提示!SA 5DF 根据国家情况只能与某些特种装备配合使用。
具有停停走走功能的自适应巡航控制系统 (ACC) 目前只能与 SA 205 ”自动变速箱” 或 SA 2TB ”跑车自动变速箱” 一起提供。
在某些市场中由于许可限制,提供没有停停走走功能的 ACC。
没有停停走走功能的 ACC 的不同之处只在于没有近距离传感器来区别。
在欧洲,特种装备 SA 5DF 只与导航系统配合提供。原因:法律规定在射电天文台附近关闭。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
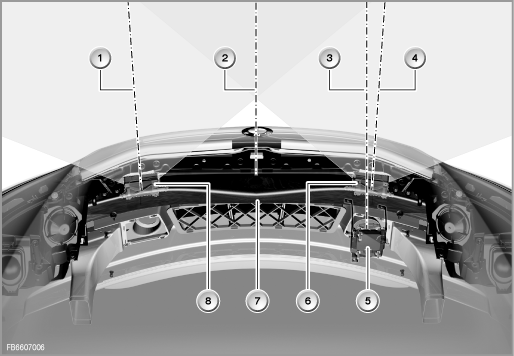
1 |
左侧近距离传感器的中心线 |
2 |
汽车纵轴线 |
3 |
远距离传感器的中心线 |
4 |
右侧近距离传感器的中心线 |
5 |
远距离传感器与支架 |
6 |
右侧近距离传感器与支架 |
7 |
保险杠支架 |
8 |
左侧近距离传感器与支架 |
在售后服务时注意下列提示:
接下来的文本描述具有停停走走功能的新型自适应巡航控制系统 (特种装备 5DF)。
具有停停走走功能的自适应巡航控制系统是以前已知的自适应巡航控制系统 (ACC) 的扩充。
作为已知的自适应巡航控制系统的补充,停停走走功能能够:
期望速度可在 30 km/h 至 180 km/h 的范围内选择:在舒适模式下以 10 为步进值或在精细模式下以 1 为步进值。期望速度在组合仪表中显示。此外能够在 4 个间距之间选择。
也有一种新型子总线与此新型特种装备同时投入使用:传感器 CAN (S-CAN)。
将描述 ACC 的下列部件:
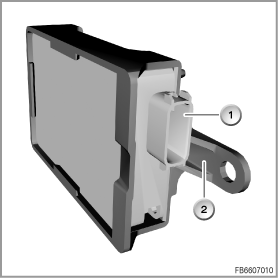
近距离传感器是雷达传感器 (近距离雷达)。
为具有停停走走功能的 ACC 安装了 2 个相同的近距离传感器。这些近距离传感器用一个塑料支架安装在前部保险杠支架上。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
近距离传感器 |
2 |
支架 |
近距离传感器通过传感器 CAN (S-CAN) 与 LDM 控制单元连接。
近距离传感器具有下列任务:
近距离传感器的目标数据只用于 ACC 的停停走走功能 (不用于自适应制动辅助系统)。
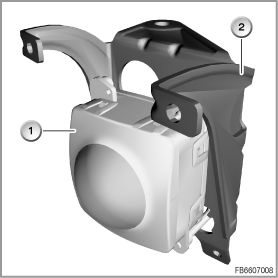
LRR 表示远距离雷达。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
远距离传感器 |
2 |
支架 |
远距离传感器 (以前的 ACC 传感器) 是一个雷达传感器。远距离传感器同时还是一个控制单元。因此远距离传感器具有一个控制单元地址,并具有诊断和编程功能。
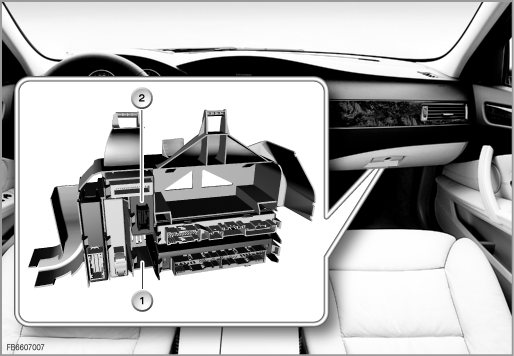
远距离传感器探测运动的目标的距离、角度以及速度。探测范围为车辆前最多 150 米。在 LDM 控制单元 (纵向动态管理) 中处理这些数据。
纵向动态管理控制单元安装在手套箱后面的装置架上。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
装置架 |
2 |
LDM 控制单元 |
LDM 控制单元执行具有停停走走功能的 ACC 的下列任务:
LRR 和 LDM 控制单元由 CAS 控制单元通过一根专用唤醒导线供电,此唤醒导线与其余唤醒导线在电气上隔离。之所以选择这种解决方案,是因为远距离传感器安装在一个有事故危险的区域内 (车辆前部)。如果发生事故时 LRR 的唤醒导线受损 (例如对地短路),通过这种解决方案可以将对其它控制单元的影响保持在一定限度内。
新型传感器 CAN (S-CAN) 连接:
由于雷达传感器的数据量很大,所以需要 S-CAN。
此数据量已超过现有总线系统的空闲传输能力。
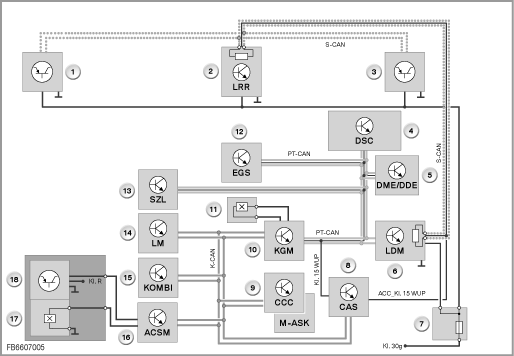
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
左侧近距离传感器 |
2 |
远距离传感器 (LRR) |
3 |
右侧近距离传感器 |
4 |
动态稳定控制系统 (DSC) |
5 |
数字式发动机电子伺控系统 (DME) 或数字式柴油机电子伺控系统 (DDE) |
6 |
纵向动态管理 (LDM) |
7 |
行李箱内的保险丝 |
8 |
便捷进入及起动系统 (CAS) |
9 |
车辆通信电脑 (CCC) 和多音频系统控制器 (M-ASK) |
10 |
车身网关模块 (KGM) |
11 |
驾驶员侧车门触头 |
12 |
电子变速箱控制系统 (EGS) |
13 |
转向柱开关中心 (SZL) |
14 |
灯光模块 (LM) |
15 |
组合仪表 (KOMBI) |
16 |
高级碰撞安全模块 (ACSM) |
17 |
安全带锁扣触头 |
18 |
座椅座垫 |
传感器 CAN 的特征:
将描述下列系统功能:
为了实现停停走走功能,需要一个复杂系统网络与分散在其它控制单元中的功能。LDM 控制单元通过数据总线与这些其它控制单元连接。
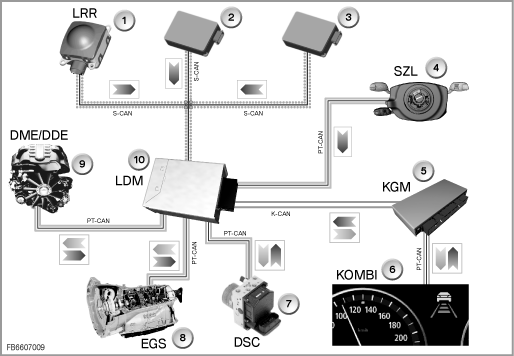
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
远距离传感器 (LRR) |
2 |
左侧近距离传感器 |
3 |
右侧近距离传感器 |
4 |
转向柱开关中心 (SZL) |
5 |
车身网关模块 (KGM) |
6 |
组合仪表 (KOMBI) |
7 |
动态稳定控制系统 (DSC) |
8 |
电子变速箱控制系统 (EGS) |
9 |
数字式发动机电子伺控系统 (DME) 或数字式柴油机电子伺控系统 (DDE) |
10 |
纵向动态管理 (LDM) |
为实现总功能,下列控制单元已联网:
控制单元 |
功能 |
|---|---|
DME 或 DDE:发动机控制 |
转换扭矩要求 ”发动机运行” 信号 |
DSC:动态稳定控制系统 |
行驶状态 实现制动干预 |
SZL:转向柱开关中心 |
操作杆 转向角 控制喇叭 |
CCC、M-ASK:导航系统 |
导航系统的数据 (对调节参数的影响) |
KOMBI:组合仪表 |
显示信息 (ACC 和检查控制信息) |
EGS:变速箱控制 |
行驶档 |
CAS:便捷进入及起动系统 |
总线端状态和唤醒导线 |
KGM:车身网关模块 |
车门触头 (驾驶员的下车打算) |
AHM:挂车模块 |
识别挂车行驶 |
ACSM:碰撞安全模块 |
驾驶员座椅占用 (驾驶员的下车打算) 安全带锁扣触头 (驾驶员的下车打算) |
RLS:晴雨 / 行车灯传感器 |
路况 (湿) |
SZM:中央控制开关中心 |
DTC 按钮 |
LM:灯光模块 |
控制警示闪烁功能 |
自适应制动辅助系统是 DSC 的一项功能。LDM 控制单元此时是 S-CAN 与 PT-CAN 之间的网关。
自适应制动辅助系统在紧急制动情况下提供最大效用。当前面行驶车辆的驾驶员猛烈制动时,远距离传感器可识别这种情况。
制动辅助系统此时支持最佳地执行制动过程,并在最好的情况下防止碰撞事故。
为此存在下列功能:
自适应制动辅助系统在 ACC 激活时始终接通。
没有停停走走功能的 ACC 也提供自适应制动辅助系统。
在达到 ACC 的功能极限时,可能会出现驾驶员不能理解的系统状态。下面将对这些情况进行描述:
保留印刷错误、内容疏忽和技术更改的可能性。