动态行驶稳定装置防止车辆在转向时侧倾或降低侧倾程度。从而提高振动舒适性。优化车辆的转向性能。
将描述动态行驶稳定装置的下列部件:
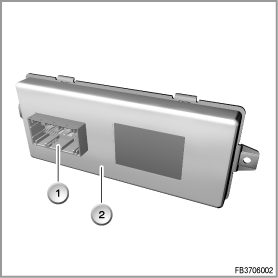
控制单元的功能由一个微处理器控制。通过总线端 Kl. 30 为此控制单元供电 (带 10 A 保险丝)。此控制单元可通过唤醒导线 (总线端 Kl. 15) 激活。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
动态行驶稳定装置插头 |
2 |
动态行驶稳定装置控制单元 |
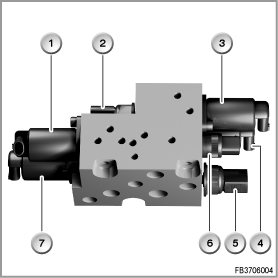
在阀体中集成了下列阀门:
阀体安装 A 柱上的右前轮罩内。阀体执行下列任务:
两个压力控制阀 (前桥和后桥各一个) 分配机油流。机油流然后通向双向马达。前桥双向马达上的压力大于或等于后桥双向马达上的压力。
测量高压机油的实际压力:在阀体输出口处各有一个用于前桥双向马达和后桥双向马达的压力传感器。
通过一个公共方向阀规定两个双向马达的旋转方向。双向阀的位置通过一个阀芯位置识别传感器识别和监控。
在下列情况下对前桥双向马达进行密封联锁。可能通过止回阀从燃油管路中抽吸。
可能通过止回阀从燃油管路中抽吸。
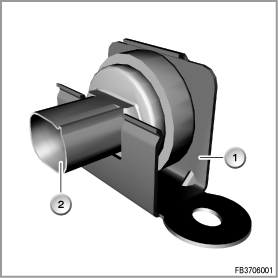
测得的横向加速度是动态行驶稳定装置的最重要的参数。横向加速度传感器的零点可由动态行驶稳定装置控制单元通过一个诊断命令在相应的服务功能中学习。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
横向加速度传感器 |
2 |
横向加速度传感器插头 |
这些压力传感器安装在阀体上。压力传感器的零点值可由动态行驶稳定装置控制单元通过诊断命令在相应的服务功能中学习。
阀芯位置识别传感器安装在阀体上,并识别方向阀的位置。
压力控制阀位于阀体中。压力控制阀电动控制。此外用于调整前桥和后桥稳定杆的压力。在直线行驶时压力控制阀处于断电状态。机油流可自由流入燃油箱。在转向时阀门通电。双向马达中的压力升高并被调节到标准值。
方向阀位于阀体中。方向阀电动控制。方向阀规定左转弯和右转弯时的机油流方向。一个阀芯位置识别传感器监控方向阀的位置。
安全阀位于阀体中。安全阀电动控制,并在断电时关闭前桥双向马达。
止回阀位于阀体中。止回阀允许抽吸机油。因此可防止双向马达内发生气蚀。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
方向阀 |
2 |
后桥压力传感器 |
3 |
前桥比例限压阀 |
4 |
后桥比例限压阀 |
5 |
前桥压力传感器 |
6 |
阀芯位置识别传感器 |
7 |
安全阀 |
|
|
主动式稳定杆在中部垂直分开。主动式稳定杆由双向马达和安装在双向马达上的稳定半杆与压力套装的滚动轴承组成。双向马达的轴和壳体分别与一根稳定半杆连接。在双向马达中分别将对置的空腔相互连接。因此在空腔内分别具有相同的压力。通过一个接头为两个空腔供应高压机油。另外两个空腔与通往热膨胀平衡罐的回流管路连接。通过不同大小的压力产生不同大小的力。由此产生一个使轴相对于壳体扭转的扭矩。因为一个稳定半杆与轴连接而另一个稳定半杆与壳体连接,两个稳定半杆相互扭转。由此产生的扭矩对侧倾起稳定抵消作用。系统压力最大可达 180 Bar。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
前部双向马达 |
2 |
液压接口 |
3 |
液压接口 |
|
|
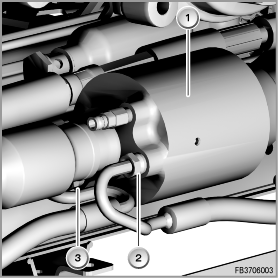
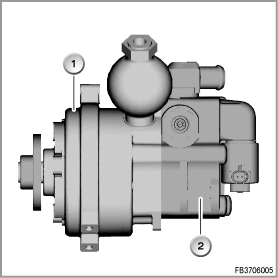
串联泵为动态行驶稳定装置以及转向辅助装置的机油回路供应机油。此泵由一个用于动态行驶稳定系统的径向活塞和一个用于转向辅助装置的叶片单元组成。动态行驶稳定装置和转向辅助装置具有公共油冷却器和机油箱。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
串联泵的径向活塞件 |
2 |
串联泵的叶片件 |
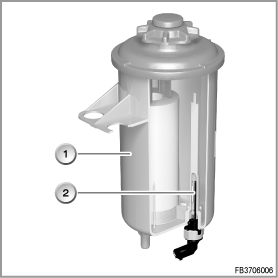
在机油箱中集成了一个滤清器和一个油位开关。当油位下降到低于最小值时,向动态行驶稳定装置控制单元发送一个信号。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
机油箱 |
2 |
油位开关 |
通过油冷却器可将机油温度保持在低于 120 °C。允许机油温度短时上升到最高 135 °C。
描述了动态行驶稳定装置的下列系统功能:
动态行驶稳定装置根据横向加速度控制两根主动式稳定杆。于是降低车身转向时的侧倾和在不良路面上的修正运动。
动态行驶稳定装置控制单元根据输入信号计算,必须如何控制双向马达。此外检查输入信号的可信度,并用于系统监控。
横向加速度是最重要的调节参数。此外还分析 PT-CAN 信号。
通过这些附加信息可改善系统的反应时间。
控制单元输出端设计成抗短路。
通过电流调节 (按脉冲宽度调制的信号) 控制阀门。通过 PT-CAN 向发动机的 DME 或 DDE 传送,是否需要附加功率。只有这样才能满足例如怠速下在试运转期间的功率要求。
动态行驶稳定装置在车辆静止时不进入工作状态。所有阀门断电。即在车辆静止时主动式稳定杆不产生扭矩。倾斜停放的车辆 (例如:路沿或不均匀的加载) 尽管可测量到横向加速度,但不会触发调节。动态行驶稳定装置自约 15 km/h 起激活。
警告!试运转时的侧倾
车辆在试运转期间进行很强烈且很快的侧倾。由于这个原因,任何人都不允许逗留在车辆附近,特别是在运动的车辆零件附近。在车辆下面或在轮罩中不允许有任何物体!当车辆全部车轮着地停在坚固的地面上时才允许进行试运转。绝对不允许在
上进行试运转。如果忽视这些要求,存在生命危险。
在打开系统的液压机构后,即在
上进行维修操作后,必须进行一次试运转。在对动态行驶稳定装置控制单元进行设码或编程后,也同样要进行一次试运转。
试运转
试运转用于学习所有传感器的参数和零点。试运转分 5 个阶段,并持续约 25 秒钟。
提示!试运转时的温度
机油温度是试运转的一个重要特性参数。试运转 (通过诊断命令) 不允许在极端温度下进行 (环境温度和系统温度)。
对控制单元进行设码或编程后必须进行一次试运转。
下列警告及其原因可能作为检查控制信息在 CID 上出现:
在出现下列警告:
时,动态行驶稳定装置已被断开。
注意,车辆在弯道上比不带动态行驶稳定系统的车辆倾斜更严重。继续行驶到附近修理厂的前提:
警告信息可能的原因:
为了能够更准确地限定原因,读取故障代码存储器的故障记忆并执行显示的检测计划。在故障已排除时,删除故障代码存储器的故障记忆。
在出现下列警告:
时通知驾驶员,其车辆的底盘系统和转向系统中有机油损耗。
在这种情况下不能继续行驶到附近的修理厂。
警告信息可能的原因:
为了能够更准确地限定原因,读取故障代码存储器的故障记忆并执行显示的检测计划。在故障已排除时,删除故障代码存储器的故障记忆。
在出现下列警告:
时通知驾驶员,底盘稳定性受到动态行驶稳定装置限制,但能够继续行驶。
下次有机会时应与修理厂联系。
警告信息可能的原因:
为了能够更准确地限定原因,读取故障代码存储器的故障记忆并执行显示的检测计划。在故障已排除时,删除故障代码存储器的故障记忆。
保留印刷错误、内容疏忽和技术更改的可能性。