E70 可以配备特种装备 2VA ”主动驾驶系统”。这种特种装备由 2 个系统组成:
垂直动态管理 (VDM) 和主动式侧翻稳定装置 (ARS:动态行驶稳定装置的销售名称)。在本文件中将描述垂直动态管理。
垂直动态管理具有下列优点:
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
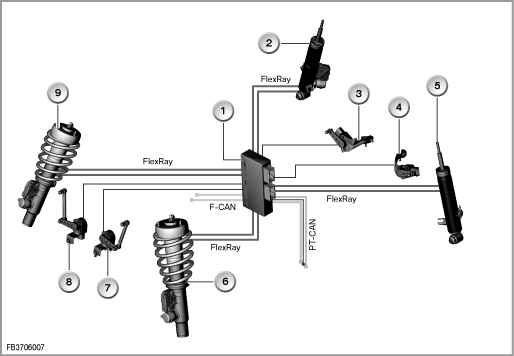
1 |
VDM 控制单元 |
2 |
带右后减震器卫星式控制单元 (EDCSHR) 的减震器 |
3 |
右后高度传感器 |
4 |
左后高度传感器 |
5 |
带左后减震器卫星式控制单元 (EDCSHL) 的减震器 |
6 |
带左前减震器卫星式控制单元 (EDCSVL) 的减震器 |
7 |
左前高度传感器 |
8 |
右前高度传感器 |
9 |
带右前减震器卫星式控制单元 (EDCSVR) 的减震器 |
|
|
F-CAN |
底盘 CAN |
FlexRay |
子总线 |
PT-CAN |
传动系 CAN |
|
|
EDC 表示:电子减震控制系统。
垂直动态管理 (VDM) 是 E65 中的连续式电子减震控制系统 (EDC-K) 的进一步发展。VDM 由一个中央控制单元和 4 个与减震器牢固连接在一起的智能减震器卫星式控制单元组成。
作为数据线第一次实现了 FlexRay 数据总线。
将描述垂直动态管理的下列部件:
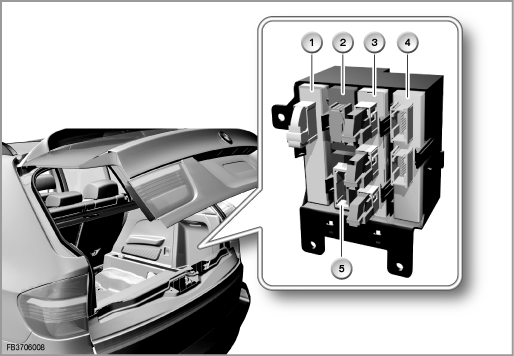
VDM 控制单元固定在行李箱内的右后装置架中。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
无钥匙便捷上车及起动系统 (CA) |
2 |
挂车模块 (AHM) |
3 |
驻车距离报警器 (PDC) |
4 |
垂直动态管理 (VDM) |
5 |
电子高度控制系统 (EHC) |
|
|
VDM 可提高行驶舒适性。当车身在垂直方向尽可能地不运动时,可获得较高的行驶舒适性:既不因路面对车辆的推动 (不平整、连接处),也不在转向时。
VDM 控制单元为减震器卫星式控制单元规定减震器的控制 (车轮个别的阻尼力)。为此 VDM 控制单元通过速度很高的 FlexRay 数据总线与减震器卫星式控制单元连接。
凭借 10 兆位/秒的数据传输率,FlexRay 明显快于今天在车辆中使用的数据总线 (车身和驱动机构或底盘区域)。FlexRay 除了支持更高的带宽外,还支持具有实时能力的数据传输。FlexRay 能够进行容错配置。
存在 4 个减震器卫星式控制单元:
这些减震器卫星式控制单元执行阻尼力的电子调节。减震器卫星式控制单元和 EDC 阀门已与减震器不可分割地连接。每个减震器卫星式控制单元都包含一个专用的垂直加速传感器。此外减震器卫星式控制单元具有下列任务:
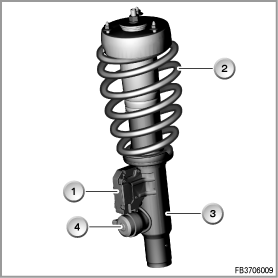
减震器卫星式控制单元:以前桥左前为例
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
左前减震器卫星式控制单元 (EDCSVL) |
2 |
钢制弹簧 |
3 |
减震器 |
4 |
EDC 阀门 |
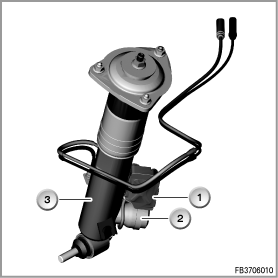
减震器卫星式控制单元:以后桥右后为例
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
右后减震器卫星式控制单元 (EDCSHR) |
2 |
EDC 阀门 |
3 |
减震器 |
|
|
总共存在 4 个高度传感器:
4 个高度传感器已连接到 VDM 控制单元上。这些高度传感器向 VDM 控制单元提供关于车身高度的动态信息。垂直动态管理由此计算出车身运动以及车轮加速度。
此外,这些传感器还向自动大灯光线水平调整提供信息。
后桥上的双高度传感器不只向 VDM 控制单元提供信号,也向 EHC 控制单元提供信号。这些双高度传感器的壳体上带有字样 ”doppelt” (双)。
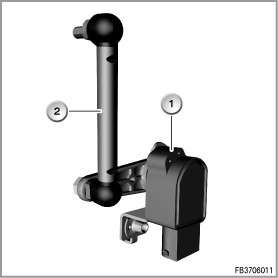
高度传感器:以前桥左前为例
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
高度传感器 |
2 |
铰接杆 |

高度传感器:以后桥左后为例
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
高度传感器 |
2 |
铰接杆 |
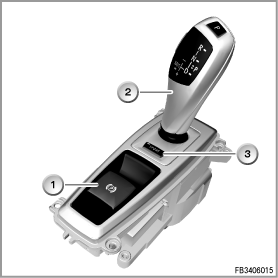
运动模式按钮位于中央控制台内,在选档按钮 (GWS) 后面。操作运动模式按钮可改变减震特性:
舒适模式 <-> 运动模式。
运动模式按钮与选档按钮 (GWS) 在电气上连接。GWS 是一个专用控制单元。信号在 PT-CAN 上输出。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
驻车制动器按钮 |
2 |
档位选择开关 (GWS) |
3 |
运动模式按钮 |
|
|
运动模式按钮上的一个 LED 指示灯显示激活的运动模式程序。此外在组合仪表的液晶显示器上显示 ”SPORT” (运动模式)。
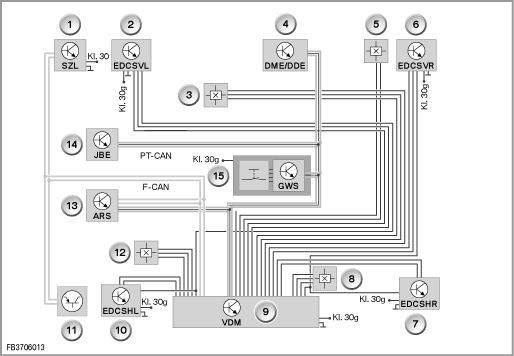
下列其它控制单元为垂直动态管理提供信号:
ARS 控制单元在 PT-CAN 上向 VDM 提供横向加速度。VDM 控制单元需要用作替代参数的信号。
DSC 控制单元在 PT-CAN 上向 VDM 提供行驶速度以及制动压力。
SZL 在 F-CAN 上向 VDM 提供转向角传感器信号 (预先识别转向)。
发动机控制系统提供 ”发动机运转” 信号。此信号在 PT-CAN 上传递。
JBE 提供总线端状态。此外,JBE 是 PT-CAN 和 K-CAN 之间的网关。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
转向柱开关中心 (SZL) |
2 |
左前减震器卫星式控制单元 (EDCSVL) |
3 |
左前高度传感器 |
4 |
数字式发动机电子伺控系统或数字式柴油机电子伺控系统 |
5 |
右前高度传感器 |
6 |
右前减震器卫星式控制单元 (EDCSVR) |
7 |
右后减震器卫星式控制单元 (EDCSHR) |
8 |
右后高度传感器 |
9 |
VDM 控制单元 |
10 |
左后减震器卫星式控制单元 (EDCSHL) |
11 |
DSC 传感器 |
12 |
左后高度传感器 |
13 |
主动式侧翻稳定装置 (ARS:动态行驶稳定装置) |
14 |
接线盒电子装置 (JBE) |
15 |
选档按钮与运动模式按钮 |
|
|
描述了垂直动态管理的下列系统功能:
为了减轻车轮运动和车身运动而监控车辆的运动。这时使用下列轴线:
例如使用下列信号进行监控:
根据这些信号可计算出当前的行驶状况。
对汽车竖轴线而言,减振调节被划分为舒适性和安全性。
垂直动态管理基于舒适性减轻车身运动。
垂直动态管理基于安全性降低车轮加速度。同时必须确保车轮不会失去与路面的接触。必须根据情况传递最佳的垂直力。
垂直动态管理也考虑最大转向角 (例如直线行驶到弯道的过渡)。在识别到转向角迅速增大时,VDM 控制单元推断出一个正在开始的转向。因此已经能够预先相应地控制减震器。垂直动态管理由此支持主动式侧翻稳定装置 (ARS)。因此 VDM 有助于减小车辆的侧倾。
垂直动态管理也识别制动以及加速过程。对此 DSC 提供关于制动压力和纵向加速度的信号。较大的制动力通常会导致车辆的俯仰颠簸运动。VDM 通过将前部减震器调整得更硬抵消这种俯仰颠簸运动。这样也能抵消加速时车辆的俯仰颠簸运动。
根据所选的减震特性 (通过运动模式按钮选择舒适模式或运动模式),可通过 VDM 控制单元匹配阻尼力的大小。与此无关,在紧急行驶状况下尽管选择了舒适模式程序,仍具有最大的行驶安全性。
根据存在的故障的类型,故障保护分 3 档起作用:

索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
检查控制信息 |
|
|
注意!在更换减震器时说明安装位置。
减震器与减震器卫星式控制单元和 EDC 阀门构成一个更换单元。在订购新零件时必须说明车型和安装位置 (例如左前)。涉及下列方面的订购时须说明上述依赖关系:发动机、悬架以及特种装备 (例如第 3 排座椅)。
提示:垂直动态管理内的多个故障代码存储记录。
VDM 控制单元在自己的故障代码存储器中只存储自己的故障。减震器卫星式控制单元的故障将在它们的故障代码存储器中存储。因此在发生故障时不仅要读取 VDM 控制单元的故障代码存储器的故障记忆,也要读取减震器卫星式控制单元的故障代码存储器的故障记忆。减震器卫星式控制单元必须可通过 BMW 诊断系统访问。因此 VDM 控制单元也用作 PT-CAN 和 FlexRay 之间的诊断网关。
注意!进行高度传感器匹配。
在更换 VDM 控制单元以及一个高度传感器后,必须重新学习高度传感器的匹配值。对此必须在 BMW 诊断系统上使用服务功能 ”高度匹配”。
注意!进行垂直加速传感器匹配。
在更换一个或多个减震器卫星式控制单元后务必进行垂直加速传感器匹配。为此必须在 BMW 诊断系统上使用服务功能 ”垂直加速度传感器匹配”。
此外车辆必须水平停放。
在更换后必须对 VDM 控制单元重新设码。
在下列条件下激活垂直动态管理:
保留印刷错误、内容疏忽和技术更改的可能性。