E70 中的远光灯辅助系统 (FLA) 为驾驶员提供远光灯操作支持。借助远光灯辅助系统可以根据交通状况自动接通和关闭远光灯。远光灯辅助系统可识别前面行驶的车辆和对面来车以及一般有路灯的地方。
将描述远光灯辅助系统的下列部件:
只有当灯开关处在开关位置 ”A” 时,才能激活远光灯辅助系统。开关位置 ”A” 表示自动车灯控制。
利用 SZL 中的行驶方向远光灯开关可使远光灯辅助系统进入工作或退出工作。在 SZL 中读取和分析行驶方向远光灯开关的开关信号。SZL 将行驶方向远光灯开关的开关信号直接发送至脚部空间模块 (FRM)。
RLSS 测量环境亮度。自晨昏起,脚部空间模块 (FRM) 接通近光灯。只有在近光灯已接通时才能激活远光灯辅助系统 (FLA)。前提是,灯开关处在开关位置 ”A”。RLSS 将其信息通过 LIN 总线发送至车顶功能中心 (FZD)。
FZD 处理来自 RLSS 的信息。FZD 通过 K-CAN 向脚部空间模块 (FRM) 报告来自 RLSS 的接通条件。
组合仪表中安装了下列显示器:
图像传感器是一部用于识别光源的专用摄像机。图像传感器将图像传递到远光灯辅助系统 (FLA)。图像通过一条 LVDS 数据线 (LVDS:低压差分信号) 传递。FLA 分析这些图像。FLA 通过 K-CAN 向脚部空间模块 (FRM) 发送远光灯接通或关闭建议。此建议与交通状况、光照情况和行驶速度有关。
DSC 根据车轮转速传感器的信号计算出行驶速度。DSC 根据 DSC 传感器的信号计算出偏航角速率。FLA 利用偏航角速率信息更好地分析转向期间的图像。DSC 将行驶速度和偏航角速率计算结果通过 PT-CAN 发送至接线盒电子装置 (JBE)。
FRM 接收远光灯的不同输入端参数。
FRM 处理下列输入端参数:
FRM 根据这些输入端参数决定,是否接通或关闭远光灯。FRM 控制远光灯的大灯。FRM 控制组合仪表中的指示灯。在远光灯辅助系统失灵时,显示一个检查控制符号。FRM 连接在 K-CAN 上。
JBE 通过 PT-CAN 接收 DSC 的计算结果。JBE 通过 K-CAN 向 FRM 发送其信息。
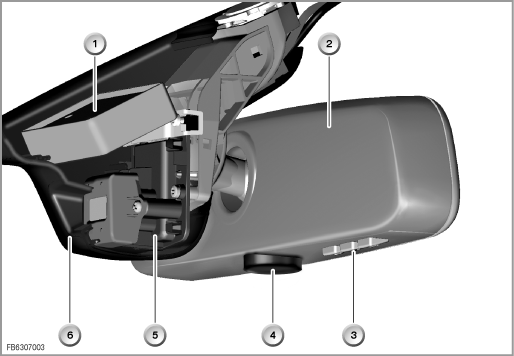
本图显示 E70 的车内后视镜
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
雨天 / 行车灯 / 光照传感器 (RLSS) |
2 |
车内后视镜中的 FLA 控制单元 |
3 |
集成式通用遥控器的按钮 |
4 |
防盗报警系统的发光二极管 |
5 |
图像传感器 |
6 |
盖板 |
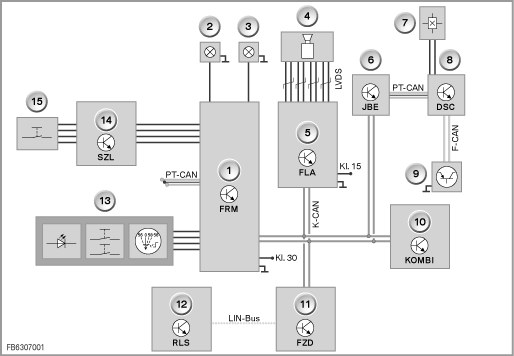
E70 方框图
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
脚部空间模块 (FRM) |
2 |
左侧远光灯 |
3 |
右侧远光灯 |
4 |
图像传感器 |
5 |
远光灯辅助系统 (FLA) |
6 |
接线盒电子装置 (JBE) |
7 |
车轮转速传感器 |
8 |
动态稳定控制系统 (DSC) |
9 |
DSC 传感器 |
10 |
组合仪表 |
11 |
车顶功能中心 (FZD) |
12 |
雨天 / 行车灯 / 光照传感器 (RLSS) |
13 |
灯开关 |
14 |
转向柱开关中心 (SZL) |
15 |
行驶方向远光灯开关 |
|
|
远光灯辅助系统根据交通状况向 FRM 发送一个远光灯接通建议或关闭建议。FRM 根据这个建议和不同的其它输入端参数决定,是否接通或关闭远光灯。
描述了远光灯辅助系统的下列系统功能:
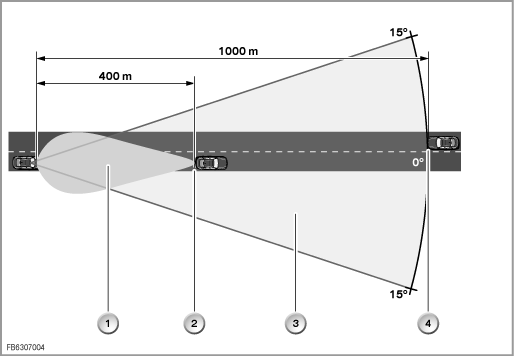
图像传感器的感知范围
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
远光灯光束 |
2 |
前面行驶车辆的尾灯 |
3 |
向前的图像传感器的感知范围 |
4 |
对面来车的大灯 |
远光灯光束的作用距离约 400 m。图像传感器感知范围的作用距离约 1000 m。因此可确保,图像传感器在远光灯光束给对面来车造成眩目之前即识别到对面来车。当图像传感器识别到一辆对面来车时,FLA 向 FRM 发送一个关闭建议。FRM 关闭远光灯。
当图像传感器识别到一部前面行驶的车辆时,FLA 向 FRM 发送一个关闭建议。FRM 关闭远光灯。
当图像传感器识别到照明充分的环境时,FLA 向 FRM 发送一个关闭建议。FRM 关闭远光灯。充分的照明意味着:
当不存在任何遮暗远光灯的理由时,FRM 接通远光灯。大灯被打开。
FLA 一激活,组合仪表中的远光灯辅助系统指示灯 (桔黄色) 就亮起。此外,远光灯一接通,远光灯指示灯 (蓝色) 就亮起。当 FLA 识别到系统故障时,显示一个检查控制符号 (黄色)。
在下列情况下可能导致 FLA 的功能受限:
为了确保远光灯辅助系统无故障地工作,必须将图像传感器校准到与中心线平行。FLA 在夜间行驶时可以最多自动向左校准 3° 和向右校准 3°。因此可补偿与中心线的细微偏差。适合于自动校准远光灯辅助系统的行驶状态是:
保留印刷错误、内容疏忽和技术更改的可能性。