从 E92 开始在 BMW 3 系中使用电动机械式助力转向系统 (EPS:Electronic Power Steering)。此外,EPS 与柴油发动机 M57TU2 一起在 2006 年 9 月开始上市。EPS 将逐渐作为 CO2 措施在所有其它车型中使用。
电动机械式助力转向系统 (EPS) 与传统液压助力转向机构在转向助力上有区别。EPS 通过一个电动伺服马达而非液压驱动装置为驾驶员提供助力。
该伺服马达只在转向时激活。因此,该伺服马达在直线行驶时不消耗功率。
电动机械式助力转向系统具有下列优点:
在 E92 上,EPS 的驱动机构与车桥平行布置。与车桥平行布置相对于布置在小齿轮或转向柱上有许多优点。与车桥平行布置在可达到的转向横拉杆力、抖动状况以及噪音方面有优点。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
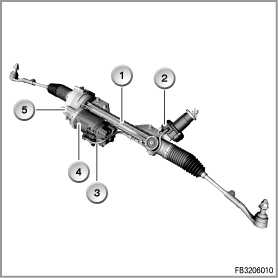
1 |
齿条 |
2 |
转向阻力矩传感器 |
3 |
控制单元 |
4 |
伺服马达 |
5 |
减速器 |
|
|
将描述电动机械式助力转向系统的下列部件:
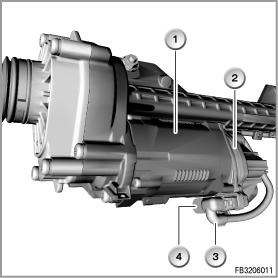
伺服单元由下列部件组成:
EPS 控制单元是电动机械式助力转向系统的一部分。EPS 控制单元通过 2 个插头与车载网络连接。
转向阻力矩传感器通过另外一个插头与 EPS 控制单元连接。
在 EPS 控制单元中存储了多条伺服助力、主动式方向盘复位以及减震特性的特性线。根据输入端参数计算出的数值与相应的特性线一起得出必要的转向助力。
后部保险丝支架 (行李箱) 通过总线端 Kl. 30 为伺服单元供电。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
伺服马达 |
2 |
EPS 控制单元 |
3 |
转向阻力矩传感器的插头连接 |
4 |
车载网络的插头连接 |
此伺服马达是一个无集流环的同步直流马达 (永久磁铁)。此伺服马达驱动减速器。于是伺服马达的功率传递到齿条上。
在控制单元的线路板上有 2 个马达位置传感器 (冗余)。这两个传感器利用霍尔效应原理工作 (带磁轮的霍尔传感器)。磁轮固定在马达轴上。
马达位置传感器 1 确定伺服马达的位置。此传感器提供一个正弦波信号和一个余弦信号。根据这些信号可以确定出伺服马达的转子位置。马达位置传感器 2 用于监控 (可信度检查)。
这两个传感器由 EPS 控制单元供电。
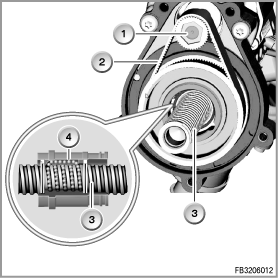
减速器将伺服马达的功率传递到齿条上。伺服马达和方向盘之间的转动比约为 21:1。
减速器由一个皮带传动机构和一个滚珠丝杠传动机构组成。滚珠丝杠传动机构的坡度为每圈 7 mm。
伺服马达驱动齿形带。皮带传动机构的减速为 2.85:1。齿形带驱动滚珠丝杠传动机构。滚珠丝杠传动机构具有一个内部球形再循环 (5 个循环)。滚珠丝杠传动机构已进行噪音优化。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
伺服马达驱动轴 |
2 |
齿形带 |
3 |
齿条 |
4 |
滚珠链 |
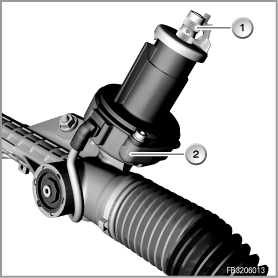
转向阻力矩传感器以数字方式检测驾驶员施加的转向阻力矩。工作范围为 4 个方向盘的转动圈数 (对应于 1440°)。
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
带扭杆的小齿轮 |
2 |
转向阻力矩传感器 |
在转向阻力矩传感器中有 2 个传感器 (冗余)。这两个传感器利用霍尔效应原理工作 (带磁轮的霍尔传感器)。
扭杆通过转向阻力矩保持位置。这时扭杆将转向阻力矩传递到小齿轮上。
两个传感器各提供一个正弦波信号和一个余弦信号。根据这些信号可确定驾驶员施加的转向阻力矩。这两个传感器相互独立地工作。第 2 个传感器是为了系统的更高可用性而安装的 (冗余)。
这些传感器将确定的数据数字化。信号通过一个冗余的双线连接传递。
两个传感器由 EPS 控制单元供电。
下列其它控制单元与电动机械式助力转向系统通信:
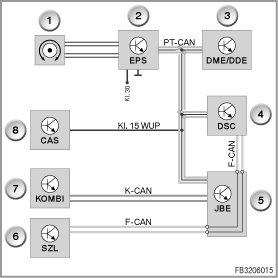
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
转向阻力矩传感器 |
2 |
EPS 控制单元 |
3 |
数字式发动机电子伺控系统 (DME) 或数字式柴油机电子伺控系统 (DDE) |
4 |
动态稳定控制系统 (DSC) |
5 |
接线盒电子装置 (JBE) |
6 |
转向柱开关中心 (SZL) |
7 |
组合仪表 (KOMBI) |
8 |
便捷进入及起动系统 (CAS) |
F-CAN |
底盘 CAN |
K-CAN |
车身 CAN |
Kl. 15 WUP |
总线端 Kl. 15 唤醒导线 (唤醒) |
PT-CAN |
传动系 CAN |
行驶稳定性控制系统提供总线信号形式的行驶速度。为此相应的控制单元通过 PT-CAN (传动系 CAN) 与 EPS 连接。
转向角传感器集成在转向柱开关中心 (SZL) 中。转向角传感器提供转向角信号。相对于马达位置传感器信号对转向角传感器信号进行可信度检查。在偏差过大时断开转向助力并存储故障代码存储记录。
EPS 根据马达位置传感器信号计算出转向角和转向角速度。转向角传感器的信号只在初始化设置和可信度检查时使用。
转向柱开关中心通过 PT-CAN 连接。
发动机控制在 PT-CAN 上提供 ”发动机正在运转” 信号。在某些工作条件 (例如发动机起动) 时需要发动机转速信号。
当电动机械式助力转向系统 (EPS) 失效时,在液晶显示器上出现一个黄色检查控制符号。同时组合仪表中的固定指示灯亮起。
此检查控制符号有下列意义:
”EPS 失效”

索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
组合仪表 |
2 |
指示灯和检查控制符号 |
检查控制信息亮起的可能原因有:
描述了电动机械式助力转向系统 (EPS) 的下列系统功能:
在系统中集成了伺服转向助力系统、视车速而定的转向助力系统的电子调节装置。EPS 控制单元根据不同的输入端参数确定出必要的转向助力。
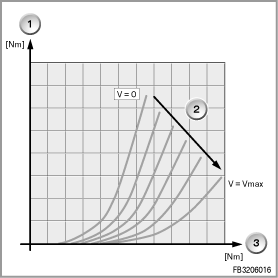
索引 |
解释 |
索引 |
解释 |
|---|---|---|---|
1 |
转向助力系统的扭矩 |
2 |
行驶速度 |
3 |
由驾驶员施加的转向阻力矩 |
|
|
在控制单元中存储了转向助力和减震特性的特性线。根据输入端参数计算出的数值与特性线一起得出必要的转向助力。伺服马达和减速器产生转向助力。
转向助力的重要输入端参数有:
EPS 匹配发动机位置传感器和转向角传感器的信号偏差 (例如在弯曲的路面上直线行驶时)。
在通过弯道后一旦驾驶员不再施加转向阻力矩,主动式转向系复位就将转向系重新引导回直线行驶位置。为此 EPS 控制单元需要来自转向角传感器的转向角信号。主动式转向系复位确保转向系在整个工作温度上平和地返回。在低温时从极限位置的主动式转向系复位尤其重要。由此可提高操作舒适性。
在主动式转向系复位中集成了一个滚动减震。
关于路面的信息例如有摩擦系数变化或状态。EPS 通过转向阻力矩的改变确定这些信息。
根据下列参数计算出前桥上的加速度。
EPS 又据此为主动式路面信息反馈计算出转向阻力矩比例。
在过电压大于 17 V 时转向助力断开。EPS 控制单元存储一个故障。组合仪表中的一个检查控制符号亮起。当电压重新下降到低于 16 V 时,转向助力恢复目前要求的值。当要求的转向助力 100 % 达到时,检查控制符号熄灭。
在低电压小于 10.5 V 时马达功率线性降低,直到 9 V 为止。低于 9 V 时不再发生转向助力。在 40 % 的转向助力时输出检查控制信息 (并存储故障代码存储记录)。当电压重新上升到高于 10 V 时,转向助力恢复目前要求的值。当要求的转向助力 100 % 达到时,检查控制符号熄灭。
作为过热保护,EPS 根据末级温度在 0 到 100 % 之间减小马达的标准扭矩。此时 EPS 控制单元按下列档执行减小:
EPS 在压上路沿石时识别到过载。这时下列信号参与识别:
EPS 在左侧和右侧各有一个作为软件功能的极限位置。因此可防止机械极限位置 (缓冲器) 提前磨损。此软件功能使用下列信号计算极限位置:
注意!学习极限位置。
在更换转向系后必须重新学习转向器的极限位置。
错误学习的极限位置可能导致转向助力在极限位置上突然消失。
在学习极限位置时必须满足下列条件:
在学习极限位置时必须将方向盘缓慢地一次向左和向右回转到极限位置。转向速度必须低于方向盘每秒钟转动 1 圈。在极限位置上缓慢提高转向力,直到方向盘不再继续转动。
在约 5 秒钟后组合仪表上的指示灯和检查控制符号熄灭。
在 BMW 诊断系统中提供下列服务功能:
利用这项服务功能可以删除极限位置的数值 (例如在错误学习后)。同时删除转向角的偏差。
在更换后必须对 EPS 控制单元进行设码。
在下列情况激活转向助力系统:
当发动机静止且行驶速度为 0 时,转向助力系统退出工作。
保留印刷错误、内容疏忽和技术更改的可能性。