Mit dem E92 setzt eine elektromechanische Servolenkung (EPS: Electronic Power Steering) im BMW 3er ein. Dabei läuft die EPS mit dem Dieselmotor M57TU2 in 09/2006 an. Nach und nach setzt die EPS als CO2-Maßnahme in allen weiteren Modellen ein.
Die elektromechanische Servolenkung (EPS) unterscheidet
sich zu einer herkömmlichen Hydrolenkung durch die Lenkkraftunterstützung.
Die EPS unterstützt den Fahrer durch einen elektrischen
Stellmotor statt durch einen hydraulischen Antrieb.
Der
Stellmotor ist nur aktiv, wenn gelenkt wird. Dadurch nimmt der Stellmotor
bei Geradeausfahrt keine Leistung auf.
Die elektromechanische Servolenkung bietet folgende Vorteile:
Beim E92 ist der Antrieb für die EPS achsparallel
angeordnet. Die achsparallele Anordnung hat Vorteile gegenüber
Anordnungen am Ritzel oder an der Lenksäule. Die achsparallele
Anordnung hat Vorteile hinsichtlich der erreichbaren Spurstangenkräfte, des
Schwingungsverhaltens sowie der Akustik.
Index |
Erklärung |
Index |
Erklärung |
|---|---|---|---|
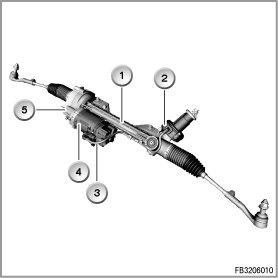
1 |
Zahnstange |
2 |
Lenkmomentsensor |
3 |
Steuergerät |
4 |
Stellmotor |
5 |
Untersetzungsgetriebe |
|
|
Folgende Bauteile für die elektromechanische Servolenkung werden beschrieben:
Die Servoeinheit besteht aus folgenden Bauteilen:
Das EPS-Steuergerät ist ein Teil der
elektromechanischen Servolenkung. Das EPS-Steuergerät
ist mit 2 Steckverbindungen am Bordnetz angeschlossen.
Der
Lenkmomentsensor ist über eine weitere Steckverbindung
am EPS-Steuergerät angeschlossen.
Im EPS-Steuergerät sind mehrere Kennlinien für die Servounterstützung, aktive Lenkradrückstellung sowie die Dämpfungscharakteristik gespeichert. Die aus den Eingangsgrößen berechneten Werte ergeben zusammen mit der jeweiligen Kennlinie die notwendige Lenkkraftunterstützung.
Der Sicherungsträger hinten (Gepäckraum)
versorgt die Servoeinheit mit Klemme 30.
Index |
Erklärung |
Index |
Erklärung |
|---|---|---|---|
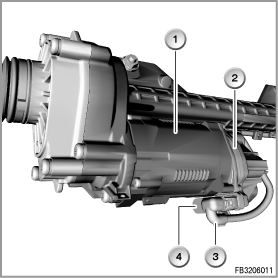
1 |
Stellmotor |
2 |
EPS-Steuergerät |
3 |
Steckverbindung zum Lenkmomentsensor |
4 |
Steckverbindung zum Bordnetz |
Der Stellmotor ist ein kollektorloser, synchroner Gleichstrommotor (Permanentmagnet). Der Stellmotor treibt das Untersetzungsgetriebe an. Dadurch wird die Leistung des Stellmotors auf die Zahnstange übertragen.
Auf der Platine des Steuergeräts sind 2 Motorlagesensoren
(Redundanz). Beide Sensoren nutzen das Prinzip des Halleffekts (Hallsensor
mit Magnetrad). Das Magnetrad ist auf der Motorwelle befestigt.
Der
Motorlagesensor 1 ermittelt die Position des Stellmotors. Der Sensor
liefert ein Sinussignal und ein Cosinussignal. Aus den Signalen
wird die Rotorposition des Stellmotors ermittelt. Der Motorlagesensor
2 dient der Überwachung (Plausibilisierung).
Beide
Sensoren werden vom EPS-Steuergerät mit Spannung
versorgt.
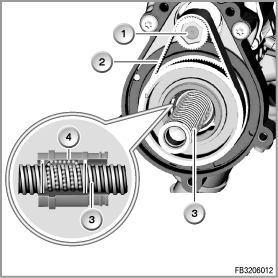
Das Untersetzungsgetriebe überträgt die Leistung des Stellmotors auf die Zahnstange. Das Umdrehungsverhältnis zwischen Stellmotor und Lenkrad beträgt ca. 21:1.
Das Untersetzungsgetriebe besteht aus einem Riementrieb
und einem Kugelgewindetrieb. Der Kugelgewindetrieb hat eine Steigung
von 7 mm pro Umdrehung.
Der Stellmotor treibt
den Zahnriemen an. Der Riementrieb hat eine Untersetzung von 2,85:1.
Der Zahnriemen treibt den Kugelgewindetrieb an. Der Kugelgewindetrieb
verfügt über eine interne Kugelrückführung
(5 Umläufe). Der Kugelgewindetrieb ist geräuschoptimiert.
Index |
Erklärung |
Index |
Erklärung |
|---|---|---|---|
1 |
Antriebswelle Stellmotor |
2 |
Zahnriemen |
3 |
Zahnstange |
4 |
Kugelkette |
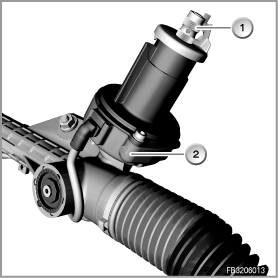
Der Lenkmomentsensor erfasst digital das vom Fahrer aufgebrachte
Lenkmoment. Der Arbeitsbereich beträgt 4 Lenkradumdrehungen
(entspricht 1440°).
Index |
Erklärung |
Index |
Erklärung |
|---|---|---|---|
1 |
Ritzel mit Torsionsstab |
2 |
Lenkmomentsensor |
Im Lenkmomentsensor sind 2 Sensoren (Redundanz). Beide Sensoren nutzen das Prinzip des Halleffekts (Hallsensor mit Magnetrad).
Durch das Lenkmoment verwindet sich der Torsionsstab.
Dabei überträgt der Torsionsstab das Lenkmoment
auf das Ritzel.
Beide Sensoren liefern je ein Sinussignal
und ein Cosinussignal. Aus den Signalen wird das aufgebrachte Lenkmoment
des Fahrers ermittelt. Die beiden Sensoren arbeiten unabhängig
voneinander. Der 2. Sensor ist wegen der höheren Verfügbarkeit
des Systems vorhanden (Redundanz).
Die Sensoren digitalisieren
die ermittelten Daten. Die Signale werden über eine redundante
Zweidrahtverbindung übertragen.
Beide Sensoren
werden vom EPS-Steuergerät mit Spannung versorgt.
Folgende weitere Steuergeräte kommunizieren
mit der elektromechanischen Servolenkung:
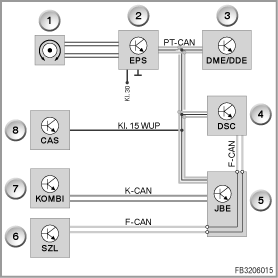
Index |
Erklärung |
Index |
Erklärung |
|---|---|---|---|
1 |
Lenkmomentsensor |
2 |
EPS-Steuergerät |
3 |
Digitale Motor Elektronik (DME) oder Digitale Diesel Elektronik (DDE) |
4 |
Dynamische Stabilitäts-Control (DSC) |
5 |
Junction-Box-Elektronik (JBE) |
6 |
Schaltzentrum Lenksäule (SZL) |
7 |
Instrumentenkombination (KOMBI) |
8 |
Car Access System (CAS) |
F-CAN |
Fahrwerks-CAN |
K-CAN |
Karosserie-CAN |
Kl. 15 WUP |
Klemme 15 Weckleitung (Wake-up) |
PT-CAN |
Powertrain-CAN |
Das Fahrstabilitätsregelsystem liefert die Fahrgeschwindigkeit als Bus-Signal. Dazu ist das entsprechende Steuergerät durch den PT-CAN (Powertrain-CAN) mit der EPS verbunden.
Im Schaltzentrum Lenksäule (SZL) ist der Lenkwinkelsensor
integriert. Der Lenkwinkelsensor liefert als Signal den Lenkwinkel.
Das Lenkwinkelsensorsignal wird gegen das Signal des Motorlagesensors
plausibilisiert. Bei zu großer Abweichung wird die Lenkkraftunterstützung
mit Fehlerspeichereintrag abgeschaltet.
Den Lenkwinkel
und die Lenkwinkelgeschwindigkeit berechnet die EPS aus dem Signal des
Motorlagesensors. Das Signal des Lenkwinkelsensors wird nur zur
Initialisierung und Plausibilisierung benötigt.
Das Schaltzentrum Lenksäule ist über den PT-CAN angeschlossen.
Die Motorsteuerung liefert das Signal ”Motor läuft” auf dem PT-CAN. Für bestimmte Betriebsbedingungen (z. B. Motorstart) wird als Signal die Motordrehzahl benötigt.
Bei Ausfall der elektromechanischen Servolenkung (EPS)
erscheint im LC-Display ein gelbes Check-Control-Symbol.
Gleichzeitig leuchtet die feste Kontrollleuchte in der Instrumentenkombination.
Das
Check-Control-Symbol hat folgende Bedeutung:
”EPS ohne Funktion”

Index |
Erklärung |
Index |
Erklärung |
|---|---|---|---|
1 |
Instrumentenkombination |
2 |
Kontrollleuchte und Check-Control-Symbol |
Mögliche Ursachen für das Aufleuchten der Check-Control-Meldung können sein:
Folgende Systemfunktionen sind für die elektromechanische Servolenkung (EPS) beschrieben:
Im System integriert ist die Servotronic, die elektronische
Regelung der geschwindigkeitsabhängigen Lenkkraftunterstützung.
Das EPS-Steuergerät ermittelt die erforderliche
Lenkkraftunterstützung aus verschiedenen Eingangsgrößen.
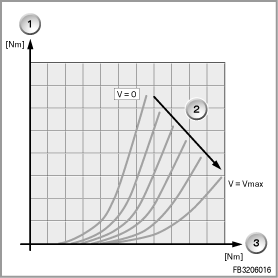
Index |
Erklärung |
Index |
Erklärung |
|---|---|---|---|
1 |
Moment der Lenkkraftunterstützung |
2 |
Fahrgeschwindigkeit |
3 |
vom Fahrer aufgebrachtes Lenkmoment |
|
|
Im Steuergerät sind Kennfelder für die Unterstützungs- und Dämpfungscharakteristiken hinterlegt. Die aus den Eingangsgrößen berechneten Werte ergeben zusammen mit der Kennlinie die notwendige Lenkkraftunterstützung. Vom Stellmotor und dem Untersetzungsgetriebe wird die Lenkkraftunterstützung erbracht.
Wichtige Eingangsgrößen für die Lenkkraftunterstützung sind:
Die EPS passt die Abweichung der Signale vom Motorlagesensor
und Lenkwinkelsensor an (z. B. gekrümmte Fahrbahn
bei Geradeausfahrt).
Die aktive Lenkungsrückstellung führt die Lenkung nach einer Kurve wieder in Geradeausstellung zurück, sobald der Fahrer kein Lenkmoment mehr aufbringt. Dazu benötigt das EPS-Steuergerät den Lenkwinkel vom Lenkwinkelsensor. Die aktive Lenkungsrückstellung stellt einen harmonischen Rücklauf der Lenkung über die gesamte Betriebstemperatur sicher. Speziell bei kalten Temperaturen ist eine aktive Lenkungsrückstellung aus den Endpositionen wichtig. Dadurch erhöht sich der Bedienkomfort.
In die aktive Lenkungsrückstellung ist eine
Schlingerdämpfung integriert.
Informationen zur Fahrbahn sind z. B. Reibwertänderungen oder Beschaffenheit. Die EPS vermittelt diese Information durch eine Änderung des Lenkmoments.
Aus den folgenden Größen wird die Beschleunigung an der Vorderachse berechnet:
Daraus wiederum berechnet die EPS einen Anteil des Lenkmoments
für die aktive Fahrbahnrückmeldung.
Bei Überspannung größer als 17 Volt schaltet die Lenkkraftunterstützung ab. Das EPS-Steuergerät speichert einen Fehler. Ein Check-Control-Symbol in der Instrumentenkombination leuchtet auf. Wenn die Spannung wieder auf unter 16 Volt sinkt, kehrt die Lenkkraftunterstützung auf den momentan geforderten Wert zurück. Das Check-Control-Symbol erlischt, wenn 100 % der geforderten Lenkkraftunterstützung erreicht werden.
Bei einer Unterspannung kleiner als 10,5 Volt
wird die Motorleistung linear bis 9 Volt reduziert. Unter
9 Volt findet keine Lenkkraftunterstützung mehr
statt. Die Check-Control-Meldung wird bei 40 % der
Lenkkraftunterstützung ausgegeben (mit Fehlerspeichereintrag).
Wenn die Spannung wieder auf über 10 Volt steigt,
kehrt die Lenkkraftunterstützung auf den momentan geforderten
Wert zurück. Das Check-Control-Symbol
erlischt, wenn 100 % der geforderten Lenkkraftunterstützung
erreicht werden.
Als Übertemperaturschutz reduziert die EPS das Motor-Sollmoment in Abhängigkeit von der Endstufentemperatur zwischen 0 und 100 %. Dabei führt das EPS-Steuergerät die Reduzierung in folgenden Stufen durch:
Die EPS erkennt Überlast beim Abdrücken von der Bordsteinkante. Dabei gehen folgende Signale in die Erkennung ein:
Die EPS hat als Softwarefunktion links und rechts einen Endanschlag. Dadurch werden die mechanischen Endanschläge (Puffer) vor frühzeitigem Verschleiß geschützt. Die Softwarefunktion benutzt folgende Signale zur Berechnung der Endanschläge:
Achtung! Endanschläge lernen.
Nach einem Tausch der Lenkung müssen die Endanschläge
des Lenkgetriebes neu gelernt werden.
Fehlerhaft gelernte
Endanschläge können zum schlagartigen Wegfall
der Lenkkraftunterstützung im Endanschlag führen.
Folgende Bedingungen müssen beim Lernen der Endanschläge erfüllt sein:
Beim Lernen der Endanschläge muss das Lenkrad langsam einmal komplett nach links und rechts eingeschlagen werden. Die Lenkgeschwindigkeit muss unter 1 Lenkradumdrehung pro Sekunde liegen. In den Endanschlägen Lenkkraft langsam erhöhen, bis sich das Lenkrad nicht mehr weiterdreht.
Nach ca. 5 Sekunden erlöschen die Kontrollleuchte
und das Check-Control-Symbol in der Instrumentenkombination.
Im BMW Diagnosesystem steht folgende Servicefunktion zur Verfügung:
Mit dieser Servicefunktion werden die Werte für
die Endanschläge gelöscht (z. B. nach fehlerhaftem
Lernen). Gleichzeitig wird die Abweichung zum Lenkwinkel gelöscht.
Nach einem Tausch muss das EPS-Steuergerät
kodiert werden.
Unter folgenden Bedingungen wird die Lenkkraftunterstützung aktiviert:
Wenn der Motor steht und die Fahrgeschwindigkeit 0 ist,
wird die Lenkkraftunterstützung deaktiviert.
Druckfehler, Irrtümer und technische Änderungen vorbehalten.