Information is shown in the LC display.
The sensor test can be selected as follows:
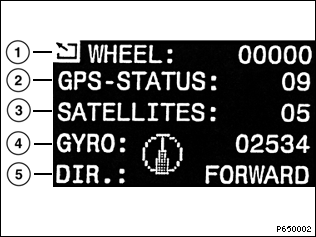
The following mask then appears in the display
Display |
Setpoint |
If not OK, carry out following test |
1 |
While driving (as from approx. 5 km/h): > 0 |
Wheel speed sensor |
2 |
With unobstructed upward field of vision: 11 or 12 |
GPS |
3 |
With unobstructed upward field of vision: > 3 |
GPS |
4 |
Direction arrow clearly moves out of zero position when turning off. When stationary and driving straight ahead: 2500 mV+/-400 mV; during turn-off: outside the above specified range. |
If value is not OK: Replace navigation computer. |
5 |
With reverse engaged <BACKWARD> |
Reverse |
Definition GPS status
Display |
GPS status |
Definition |
00 |
No GPS |
GPS inoperable |
01 |
Communication fault |
GPS receiver navigation computer |
02 |
Receiver fault |
GPS receiver/antenna |
03 |
No almanac |
No data yet stored from satellites |
04 |
Search conducted for satellites |
GPS searches for satellites |
05 |
1 satellite found |
Positioning via GPS not possible |
06 |
2 satellites found |
Positioning via GPS not possible |
07 |
3 satellites found |
2D-positioning possible |
08 |
4 satellites found |
2D or 3D-positioning possible |
09 |
5 satellites found |
2D or 3D-positioning possible |
10 |
6 satellites found |
2D or 3D-positioning possible |
11 |
2D-position determined |
Degrees latitude and longitude determined (navigation function possible). |
12 |
3D-position determined |
Degrees longitude, latitude and altitude determined (more accurate positioning possible). |
Concerning 03: After applying supply voltage terminal 30, terminal R and making satellite contact, data from satellites is collected and stored in the GPS receiver. If this data is not available, e.g. after disconnecting battery or GPS receiver, the vehicle must be parked outside with unobstructed upward field of vision and terminal R switched on (approx. 15 minutes).