With the E92, an electromechanical power steering (EPS: Electronic Power Steering) is introduced in the BMW 3 Series. The EPS will be introduced with diesel engine M57TU2 in 09/2006. Gradually, the EPS will be introduced as a CO2 measure in all other models.
The electromechanical power steering (EPS) differs from conventional hydraulic steering in that it has steering power assistance. The EPS supports the driver with an electrical actuator motor instead of a hydraulic drive.
The actuator motor is only active when the steering is used. This means that the actuator motor consumes no power during straight-ahead driving.
Electromechanical power steering offers the following advantages:
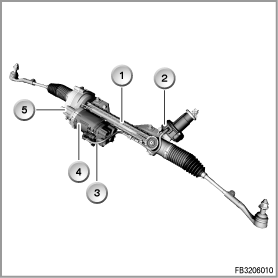
On the E92, the drive for the EPS is arranged parallel to the axle. The arrangement parallel to the axle has advantages compared to arrangements on the pinion or steering column. The arrangement parallel to the axle has advantages with regard to the steering track rod forces that can be achieved, the vibrational properties as well as the acoustic pattern.
Index |
Explanation |
Index |
Explanation |
|---|---|---|---|
1 |
Rack |
2 |
Steering momentum sensor |
3 |
Control unit |
4 |
Servomotor |
5 |
Reduction gear |
|
|
The following components are described for the electromechanical power steering:
The servo unit consists of the following components:
The EPS control unit is part of the electromechanical power steering. The EPS control unit is connected with 2 plug connections to the vehicle power system.
The steering momentum sensor is connected via another plug-in connection at the EPS control unit.
A number of characteristic curves for servo assistance, active steering wheel return as well as damping characteristics are stored in the EPS control unit. The values calculated from the input variables added to each characteristic curve result in the necessary steering power assistance.
The rear fuse carrier (luggage compartment) supplies the servo unit with terminal 30.

Index |
Explanation |
Index |
Explanation |
|---|---|---|---|
1 |
Servomotor |
2 |
EPS control unit |
3 |
Plug-in connection to the steering momentum sensor |
4 |
Plug-in connection to the vehicle network |
The actuator motor is a non-collector, synchronous DC motor (permanent magnet). The actuator motor drives the reduction gear. This transfers the power output of the actuator motor to the rack.
There are 2 motor position sensors (redundancy) on the board of the control unit. Both sensors use the principle of the Hall effect (Hall sensor with magnetic wheel). The magnetic wheel is attached to the motor shaft. The
motor position sensor 1 determines the position of the actuator motor. The sensor delivers a sine-wave signal and a cosine-wave signal. The signals are used to determine the rotor position of the actuator motor. The motor position sensor 2 is used for monitoring (plausibility check).
Both sensors are supplied with voltage by the EPS control unit.
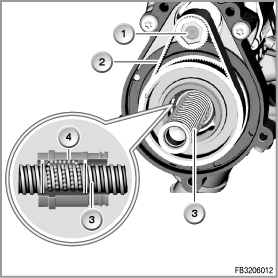
The reduction gear transfers the power output of the actuator motor to the rack. The revolution ratio between the actuator motor and steering wheel is approx. 21:1.
The reduction gear consists of a belt drive and a ball screw. The ball screw has a rise of 7 mm per revolution.
The actuator motor drives the toothed belt. The belt drive has a reduction of 2.85 : 1. The toothed belt drives the ball screw. The ball screw has an internal ball return (5 rotations). The ball screw is noise-optimised.
Index |
Explanation |
Index |
Explanation |
|---|---|---|---|
1 |
Drive shaft of actuator motor |
2 |
Toothed belt |
3 |
Rack |
4 |
Bead chain |
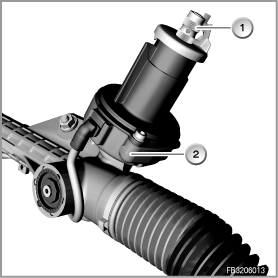
The steering momentum sensor digitally senses the steering momentum applied by the driver. The operating range is 4 steering-wheel turns (corresponds to 1440°).
Index |
Explanation |
Index |
Explanation |
|---|---|---|---|
1 |
Pinion with torsion bar |
2 |
Steering momentum sensor |
The steering momentum sensor contains 2 sensors (redundancy). Both sensors use the principle of the Hall effect (Hall sensor with magnetic wheel).
The steering momentum causes the torsion bar to twist. In doing so, the torsion bar transfers the steering momentum to the pinion.
Both sensors deliver a sine-wave signal and cosine-wave signal. The steering momentum applied by the driver is determined from the signals. The two sensors work independently of one another. The 2nd sensor is present due to the higher availability of the system (redundancy).
The sensors digitise the determined data. The signals are transferred across a redundant twin-wire connection.
Both sensors are supplied with voltage by the EPS control unit.
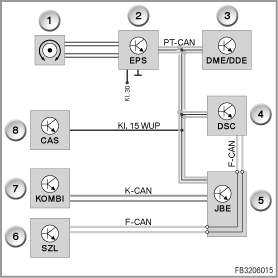
The following other control units communicate with the electromechanical power steering:
Index |
Explanation |
Index |
Explanation |
|---|---|---|---|
1 |
Steering momentum sensor |
2 |
EPS control unit |
3 |
DME (Digital Engine Electronics) or DDE (Digital Diesel Electronics) |
4 |
DSC (Dynamic Stability Control) |
5 |
Junction box electronics (JBE) |
6 |
Steering column switch cluster (SZL) |
7 |
Instrument cluster (KOMBI) |
8 |
Car Access System (CAS) |
F-CAN |
Chassis CAN |
K CAN |
Body CAN |
Terminal 15 WUP |
Terminal 15 wake-up line |
PT-CAN |
Powertrain CAN |
The driving stability control system delivers the driving speed as a bus signal. To this end, the corresponding control unit is connected via the PT-CAN (Powertrain CAN) with the EPS.
The steering angle sensor is integrated in the steering column switch cluster (SZL). The steering-angle sensor delivers the steering angle as a signal. The plausibility of the steering-angle-sensor signal is checked against the signal of the motor position sensor. If the deviation is too great, the steering power assistance is switched off with a fault code memory entry.
The EPS calculates the steering angle and steering-angle speed from the signal of the motor position sensor. The signal of the steering-angle sensor is only required for initialisation and the plausibility check.
The steering column switching centre is connected via the PT-CAN.
The engine management system delivers the signal ”Engine running” on the PT-CAN. For certain operation conditions (e.g. engine start), the engine speed is required as a signal.
In the event of failure of the electromechanical power steering (EPS), a yellow Check Control symbol appears in the LC display. Simultaneously, the fixed-position indicator lamp lights up in the instrument cluster.
The Check-Control symbol has the following meaning:
”EPS without function”

Index |
Explanation |
Index |
Explanation |
|---|---|---|---|
1 |
Instrument cluster |
2 |
Indicator lamp and Check-Control symbol |
Possible causes for the Check Control message lighting up can be:
The following system functions are described for the electromechanical power steering (EPS):
Integrated in the system is the Servotronic, the electronic control of the speed-dependent steering power assistance. The EPS control unit determines the required steering power assistance from various input variables.
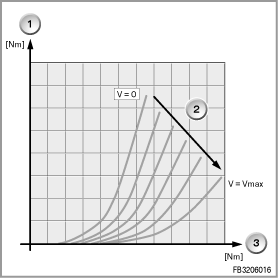
Index |
Explanation |
Index |
Explanation |
|---|---|---|---|
1 |
Moment of steering power assistance |
2 |
Road speed |
3 |
Steering momentum applied by driver |
|
|
Characteristic maps for the support and damping characteristics are stored in the control unit. The values calculated from the input variables added to each characteristic curve result in the necessary steering power assistance. The actuator motor and reduction gear provide the steering power assistance.
Important input variables for steering power assistance are:
The EPS adapts the deviation of the signals from the motor position sensor and steering-angle sensor (e.g. curbed roadway with straight-ahead driving).
After cornering, the active steering return brings the steering back to the straight-ahead setting as soon as the driver no longer applies steering momentum. To achieve this, the EPS control unit requires the steering angle from the steering-angle sensor. The active steering return ensures a harmonious return of the steering across the entire operating temperature. Active steering return from the end positions is particularly important at low temperatures. This increases operating convenience.
A gyrostabiliser is integrated in the active steering return.
Information on the road surface is e.g. changes in the friction coefficient or properties. The EPS provides this information by changing the steering momentum.
The following variables are used to calculate the acceleration at the front axle:
In turn, the EPS calculates a proportion of the steering momentum for the active road feedback.
In the case of overvoltage greater than 17 Volts, the steering power assistance switches off. The EPS control unit stores a fault. A Check Control symbol lights up in the instrument cluster. When the voltage returns to below 16 Volts, the steering power assistance returns to the currently requested value. The Check Control symbol goes out when 100 % of the requested steering power assistance is reached.
In the case of undervoltage less than 10.5 Volts, the motor output is reduced (linear) to 9 Volts. Below 9 Volts, steering power assistance is no longer provided. The Check Control message is issued at 40 % of the steering power assistance (with fault code memory entry). When the voltage returns to above 10 Volts, the steering power assistance returns to the currently requested value. The Check Control symbol goes out when 100 % of the requested steering power assistance is reached.
As over-temperature protection, the EPS reduces the specified engine torque depending on the output stage temperature between 0 % and 100 %. Here, the EPS control unit carries out the reduction in the following steps:
The EPS detects overload when the steering presses against the kerb. The following signals are included in the detection:
The EPS has an end stop on the left and right as a software function. This protects the mechanical end stops (buffers) against wear at an early stage. The software function uses the following signals to calculate the end stops:
Important! Learning the end stops.
After replacement of the steering, the end stops of the steering gear must be relearned.
Incorrectly learned end stops can lead to sudden disappearance of steering power assistance in the end stop.
The following conditions must be met on learning the end stops:
On learning the end stops, the steering wheel must be fully turned slowly once to the left and once to the right. The steering speed must be below 1 steering-wheel turn per second. In the end stops, slowly increase the steering effort until the steering wheel no longer turns.
After approx. 5 seconds, the indicator lamp and Check-Control symbol in the instrument cluster go out.
The following service function is available in the BMW diagnosis system:
This service function is used to delete the values for the end stops (e.g. after incorrect learning). At the same time, the deviation to the steering angle is deleted.
After replacement, the EPS control unit must be coded.
The steering power assistance is activated under the following conditions:
When the engine is at a standstill and the driving speed is 0, the steering power assistance is disabled.
No liability can be accepted for printing or other errors. Subject to changes of a technical nature