Le Coupé E92 est équipé, c'est une première pour les BMW Série 3, d'une direction assistée électromécanique (EPS : Electronic Power Steering). Le système EPS sera disponible à partir de 09/2006 pour les véhicules dotés du moteur diesel M57TU2. Progressivement, le système EPS sera implanté sur tous les autres modèles dans le but de réduire les émissions de CO2.
La direction assistée électromécanique (EPS) se distingue d'une direction hydraulique conventionnelle par le mode d'assistance de la direction. La direction assistée EPS fait appel, non plus à un entraînement hydraulique, mais à un servomoteur électrique.
Le servomoteur n'est actif qu'en cas de braquage de la direction. Le servomoteur n'absorbe aucun courant quand le volant se trouve en position de ligne droite.
L'assistance de direction électromécanique offre les avantages suivants :
Sur le coupé E92, l'actionneur EPS est disposé parallèlement à l'essieu. La disposition parallèle à l'essieu procure des avantages par rapport à une disposition sur le pignon ou sur la colonne de direction. La disposition parallèle à l'essieu procure des avantages en ce qui concerne les efforts exercés sur la biellette de direction ainsi que le comportement vibratoire et acoustique.
Index |
Explication |
Index |
Explication |
|---|---|---|---|
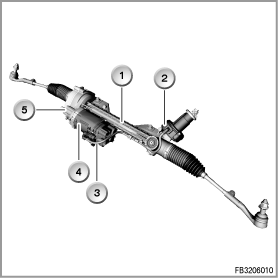
1 |
Crémaillère |
2 |
Capteur de couple de braquage |
3 |
Boîtier électronique |
4 |
Servomoteur |
5 |
Réducteur |
|
|
La présente description de fonctionnement décrit les composants suivants de la direction assistée électromécanique :
L'unité d'assistance comprend les éléments suivants :
Le boîtier électronique EPS fait partie intégrante de la direction assistée électromécanique. Le boîtier électronique EPS est relié au réseau de bord par le biais de 2 connecteurs.
Un autre connecteur relie le capteur de couple de braquage au boîtier électronique EPS.
Dans la mémoire du boîtier électronique EPS sont enregistrées plusieurs courbes caractéristiques pour l'assistance de direction, le retour actif en ligne droite et la caractéristique d'amortissement. L'assistance de direction requise résulte de la combinaison entre les valeurs calculées à partir des grandeurs d'entrée et la caractéristique correspondante.
L'unité d'assistance est alimentée en tension (borne 30) par le porte-fusibles arrière (coffre à bagages).
Index |
Explication |
Index |
Explication |
|---|---|---|---|
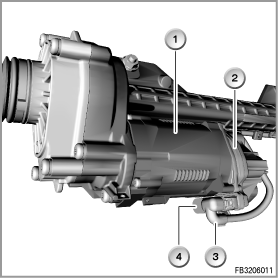
1 |
Servomoteur |
2 |
Boîtier électronique EPS |
3 |
Connecteur vers le capteur de couple de braquage |
4 |
Connecteur vers le réseau de bord |
Le servomoteur est un moteur à courant continu synchrone sans collecteur (à aimant permanent). Il entraîne le réducteur qui transmet le couple du servomoteur à la crémaillère.
Sur la carte imprimée du boîtier électronique se trouvent 2 capteurs de position moteur (redondants). Les deux capteurs exploitent l'effet Hall (capteur Hall à roue magnétique). La roue magnétique est solidaire de l'arbre du moteur.
Le capteur de position moteur 1 détermine la position du servomoteur. Le capteur délivre un signal sinus et un signal cosinus. Sur la base de ces signaux est déterminée la position du rotor du servomoteur. Le capteur de position moteur 2 sert à la surveillance (contrôle de plausibilité).
Les deux capteurs sont alimentés en tension par le boîtier électronique EPS.
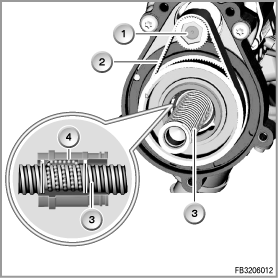
Le réducteur transmet le couple du servomoteur à la crémaillère. Le rapport de démultiplication entre le servomoteur et le volant de direction est de l'ordre de 21:1.
Le réducteur est constitué d'une transmission par courroie et d'une vis à billes. Le pas de progression de la vis à billes est de 7 mm par tour.
Le servomoteur entraîne la courroie crantée. La transmission par courroie réalise une démultiplication de 2,85:1. La courroie crantée entraîne la vis à billes. La vis à billes dispose d'une recirculation de billes interne (5 tours). La vis à billes est particulièrement silencieuse.
Index |
Explication |
Index |
Explication |
|---|---|---|---|
1 |
Arbre d'entraînement du servomoteur |
2 |
Courroie crantée |
3 |
Crémaillère |
4 |
Billes |
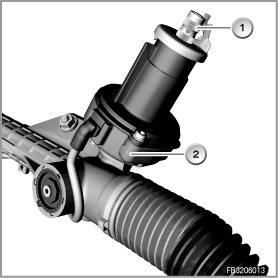
Le capteur de couple de braquage saisit de façon numérique le couple de braquage exercé par le conducteur. La plage de travail est de 4 rotations du volant (correspond à 1440°).
Index |
Explication |
Index |
Explication |
|---|---|---|---|
1 |
Pignon avec barre de torsion |
2 |
Capteur de couple de braquage |
Le capteur de couple de braquage comporte 2 capteurs (redondants). Les deux capteurs exploitent l'effet Hall (capteur Hall à roue magnétique).
Le couple de braquage exercé engendre une torsion de la barre de torsion. La barre de torsion reporte le couple de braquage sur le pignon.
Les deux capteurs délivrent chacun un signal sinus et un signal cosinus. Sur la base de ces signaux est déterminé le couple de braquage exercé par le conducteur. Les deux capteurs fonctionnent indépendamment l'un de l'autre. Le 2ème capteur existe pour des raisons de redondance, à cause de la grande disponibilité du système.
Les capteurs numérisent les données captées. Les signaux sont transmis au boîtier électronique EPS par l'intermédiaire de 2 fils redondants.
Les deux capteurs sont alimentés en tension par le boîtier électronique EPS.
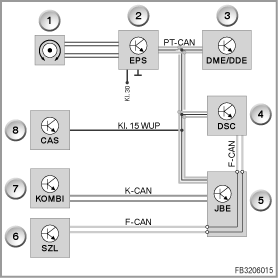
Les boîtiers électroniques suivants communiquent avec la direction assistée électromécanique :
Index |
Explication |
Index |
Explication |
|---|---|---|---|
1 |
Capteur de couple de braquage |
2 |
Boîtier électronique EPS |
3 |
Electronique numérique moteur (DME) ou Electronique numérique diesel (DDE) |
4 |
Contrôle dynamique de stabilité (DSC) |
5 |
Electronique du boîtier de jonction (JBE) |
6 |
Centrale de commande de colonne de direction (SZL) |
7 |
Combiné d'instruments (KOMBI) |
8 |
Car Access System (CAS) |
F-CAN |
Bus CAN châssis |
CAN K |
Bus CAN carrosserie |
Kl. 15 WUP |
Ligne d'éveil borne 15 (Wake up) |
PT-CAN |
Bus CAN Powertrain |
Le système de régulation de stabilité fournit la vitesse de roulage sous forme de signal de bus. Le boîtier électronique correspondant (DSC, ASC+T, ABS) est pour cela relié au boîtier électronique EPS via le bus PT-CAN (CAN Powertrain).
Le capteur d'angle de braquage est logé dans la centrale de commande de colonne de direction (SZL). Le capteur d'angle de braquage fournit comme signal l'angle de braquage. La plausibilité du signal délivré par le capteur d'angle de braquage est contrôlée par comparaison avec le signal du capteur de position moteur. En cas d'écart trop important, l'assistance de direction est désactivée et un défaut est enregistré dans la mémoire de défauts.
Le boîtier EPS calcule l'angle de braquage et la vitesse de braquage à partir du signal du capteur de position moteur. Le signal du capteur d'angle de braquage n'est requis que pour l'initialisation et le contrôle de plausibilité.
La centrale de commande de colonne de direction est reliée au bus PT-CAN.
L'électronique de gestion moteur applique le signal ”Moteur tourne” sur le bus PT-CAN. Dans certaines situations de fonctionnement (p. ex. démarrage du moteur), le boîtier EPS a besoin du signal de régime moteur.
En cas de défaillance du système EPS, un symbole check-control jaune apparaît sur l'écran LCD. Dans le même temps, le témoin fixe du combiné d'instruments s'allume.
Le symbole check-control a la signification suivante :
”Système EPS inopérant”

Index |
Explication |
Index |
Explication |
|---|---|---|---|
1 |
Combiné d'instruments |
2 |
Témoin et symbole check-control |
Causes possibles d'affichage du message check-control :
La présente description de fonctionnement décrit les fonctions système suivantes de la direction assistée électromécanique (EPS) :
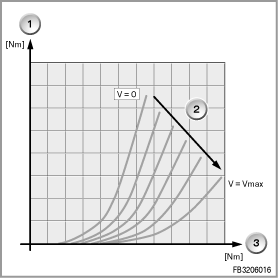
Le système intègre une fonction Servotronic, autrement dit une régulation électronique de l'assistance directionnelle asservie à la vitesse. Le boîtier électronique EPS détermine l'assistance de direction requise à partir de différentes grandeurs d'entrée.
Index |
Explication |
Index |
Explication |
|---|---|---|---|
1 |
Couple d'assistance de direction |
2 |
Vitesse du véhicule |
3 |
Couple de braquage exercé par le conducteur |
|
|
Le boîtier électronique intègre en mémoire des cartographies pour les caractéristiques d'assistance et d'amortissement. L'assistance de direction requise résulte de la combinaison entre les valeurs calculées à partir des grandeurs d'entrée et la caractéristique correspondante. Le couple d'assistance de braquage est généré par le servomoteur et le réducteur.
Grandeurs d'entrée importantes pour l'assistance de direction :
Le boîtier EPS adapte l'écart entre les signaux du capteur de position moteur et le capteur d'angle de braquage (p. ex. chaussée courbe en conduite en ligne droite).
Le retour actif de la direction replace après un virage le volant en position de ligne droite, dès que le conducteur n'exerce plus aucun couple de braquage. Le boîtier électronique EPS requiert pour cela l'angle de braquage du capteur d'angle de braquage. Le retour actif de la direction assure un retour plus harmonieux de la direction pour toute la plage de températures de fonctionnement. Il est important de disposer d'un retour actif de la direction à partir des positions de butée. Le confort d'utilisation s'en trouve amélioré.
Le retour actif de la direction intègre un amortissement de roulis.
Le boîtier EPS est informé des caractéristiques de la chaussée (p. ex. changement de coefficient d'adhérence, nature du revêtement). Sur la base de ces informations, le boîtier électronique adapte si nécessaire le couple de braquage.
A partir des grandeurs suivantes, le système EPS calcule l'accélération de l'essieu avant :
Le boîtier EPS détermine ensuite à partir de l'accélération de l'essieu la part de couple de braquage pour l'adaptation active au type de chaussée.
En présence d'une surtension supérieure à 17 V, l'assistance de direction se désactive. Le boîtier électronique EPS mémorise un défaut. Un symbole check-control s'allume sur le combiné d'instruments. Dès que la tension redescend en dessous de 16 V, l'assistance directionnelle repasse à la valeur momentanément requise. Une fois que 100 % de l'assistance de direction requise sont atteints, le symbole check-control s'éteint.
En présence d'une sous-tension inférieure à 10,5 V, la puissance du moteur est réduite linéairement jusqu'à 9 V. En deçà de 9 V, il n'y a plus d'assistance de direction. Le message check-control est généré quand l'assistance de direction n'est plus que de 40 % (il y a dans le même temps mémorisation d'un défaut). Dès que la tension redevient supérieure à 10 V, l'assistance directionnelle repasse à la valeur momentanément requise. Une fois que 100 % de l'assistance de direction requise sont atteints, le symbole check-control s'éteint.
En cas de surchauffe, le boîtier EPS réduit la consigne du couple du moteur de 0 à 100 % selon la température de l'étage de sortie. Le boîtier EPS réduit le couple en plusieurs étapes :
Le système EPS détecte quand une roue engendre une surcharge en appuyant contre un trottoir. Il se sert pour la détection les signaux suivants :
Le système EPS dispose d'une fonction permettant de définir une butée logicielle pour chacune des côtés (gauche et droit). Les butées logicielles évitent une usure prématurée des butées mécaniques (tampons). Pour le calcul des butées logicielles, le boîtier EPS utilise les signaux suivants :
Attention ! Apprentissage des butées.
Il est nécessaire, après remplacement de la direction, de réapprendre les butées du boîtier de crémaillère.
Un mauvais apprentissage des butées peut entraîner la disparition subite de l'assistance de direction en position de butée.
Conditions préalables à l'apprentissage des butées :
Pour l'apprentissage des butées, le volant doit être braqué lentement (une fois) complètement vers la gauche puis complètement vers la droite. La vitesse de braquage doit rester inférieure à 1 rotation de volant par seconde. Arrivé près des positions de butée, augmenter lentement l'effort exercé jusqu'à ce que le volant ne puisse plus être braqué davantage.
Au bout d'env. 5 secondes le témoin et le symbole check-control disparaissent sur le combiné d'instruments.
Le système de diagnostic BMW dispose des fonctions SAV suivantes :
Cette fonction SAV permet d'effacer les valeurs relatives aux butées (p. ex. après un mauvais apprentissage). Dans le même temps, l'écart par rapport à l'angle de braquage est également effacé.
Il est impératif après un remplacement de coder le boîtier électronique EPS.
Ci-dessous les conditions d'activation de l'assistance de direction EPS :
A l'arrêt du moteur quand le véhicule est immobile (vitesse de roulage = 0), l'assistance de direction est inactive.
Sous réserve de fautes d'impression, d'erreurs et de modifications techniques.