E70 のハイ ビーム アシスタント(FLA)は、運転者のハイ ビームの操作をサポートします。ハイ ビーム アシスタントを利用すると、交通状況に応じてハイ ビームが自動的にオンまたはオフになります。ハイ ビーム アシスタントは前走車や対向車、照明が設置されている場所を検知します。
ハイ ビーム アシスタントの以下のコンポーネントについて説明します:
ハイビーム アシスタントは、ライト スイッチがスイッチ位置「A」にある場合にのみ作動させることができます。スイッチ位置「A」はオート ライト コントロールを示します。
SZL のターン インディケーター/ハイビーム スイッチで、ハイビーム アシスタントをオンまたはオフにします。ターン インディケーター/ハイビーム スイッチのスイッチ信号は、SZL に読み込まれて評価されます。SZL はターン インディケーター/ハイビーム スイッチのスイッチ信号を直接フット スペース モジュール(FRM)に送ります。
RLSS は周囲輝度を測定します。薄暗くなると、フット スペース モジュール(FRM)がロー ビームを点灯させます。ハイビーム アシスタント(FLA)は、ロー ビームがオンになっている場合にのみ作動します。ライト スイッチがスイッチ位置「A」にあることが前提条件になります。RLSS は、情報を LIN バス経由でルーフ機能センター(FZD)に送ります。
FZD は RLSS からの情報を処理します。FZD はフット スペース モジュール(FRM)に RLSS のスイッチ オン条件を K-CAN を介して伝送します。
メーター パネルには以下の表示装置があります:
画像センサーは、光源を検知するための特殊なカメラです。画像センサーは画像をハイビーム アシスタント(FLA)に伝送します。画像は、LVDS データ ケーブルを介して伝送されます(LVDS:低電圧差異信号)。FLA はこの画像を評価します。FLA はハイ ビームのスイッチ オンまたはオフのアドバイスを K-CAN 経由でフット スペース モジュール(FRM)に送ります。このアドバイスは、交通状況や周囲の照明状況、車速に応じて行われます。
DSC はホィール スピード センサー信号をもとに車速を算出します。DSC は DSC センサーの信号をもとにヨー レートを算出します。FLA はコーナリング中の画像をより正確に評価するためにヨー レートの情報を利用します。DSC は車速とヨー レートの算出結果を、PT-CAN 経由でジャンクション ボックス コントロール ユニット(JBE)に送ります。
FRM はハイ ビーム用のさまざまなインプット値を受け取ります。
以下のインプット値は FRM により処理されます:
これらのインプット値をもとに、FRM はハイ ビームを点灯するか消灯するかを決定します。FRM はハイ ビームのライトを制御します。FRM はメーター パネルの表示灯を制御します。ハイビーム アシスタントに不具合があると、チェック コントロール シンボル マークが表示されます。FRM は K-CAN に接続されています。
JBE は PT-CAN 経由で DSC の算出結果を受信します。JBE は情報を K-CAN 経由で FRM に送ります。
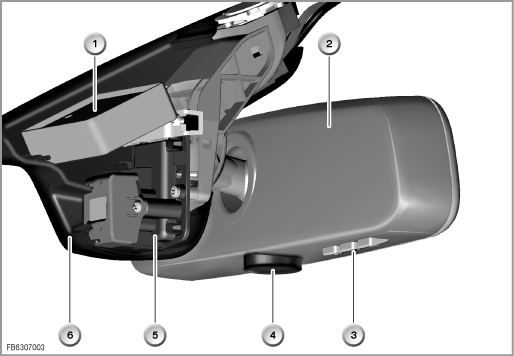
グラフィックはルーム ミラー E70
インデックス |
説明 |
インデックス |
説明 |
|---|---|---|---|
1 |
レイン/ライト ソーラー センサー(RLSS) |
2 |
ルーム ミラーの FLA コントロール ユニット |
3 |
統合ユニバーサル リモート コントロール用ボタン |
4 |
盗難防止装置用 LED |
5 |
画像センサー |
6 |
カバー |
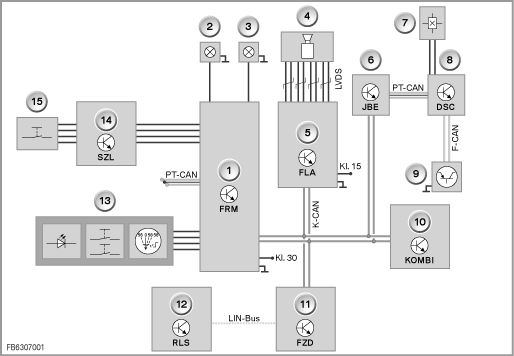
ブロック配線図 E70
インデックス |
説明 |
インデックス |
説明 |
|---|---|---|---|
1 |
フット スペース モジュール(FRM) |
2 |
左ハイ ビーム |
3 |
右ハイ ビーム |
4 |
画像センサー |
5 |
ハイ ビーム アシスタント(FLA) |
6 |
ジャンクション ボックス コントロール ユニット(JBE) |
7 |
ホィール スピード センサー |
8 |
ダイナミック スタビリティ コントロール(DSC) |
9 |
DSC センサー |
10 |
メーター パネル |
11 |
ルーフ機能センター(FZD) |
12 |
レイン/ライト ソーラー センサー(RLSS) |
13 |
ライト スイッチ |
14 |
ステアリング コラム スイッチ センター(SZL) |
15 |
ターン インディケーター/ハイ ビーム スイッチ |
|
|
ハイ ビーム アシスタントは、交通状況に応じてハイ ビームのスイッチ オンまたはオフのアドバイスを FRM に送ります。このアドバイスとその他の各種インプット値をもとに、FRM はハイ ビームを点灯するか消灯するかを決定します。
ハイビーム アシスタントの以下のシステム機能について説明します:
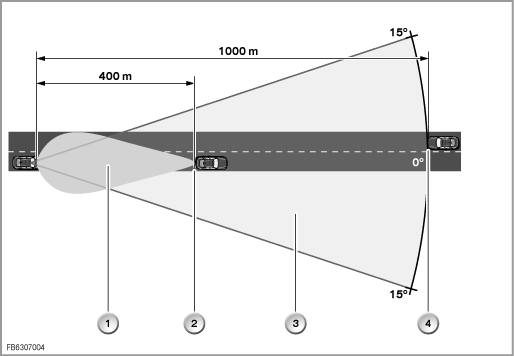
画像センサーの検知範囲。
インデックス |
説明 |
インデックス |
説明 |
|---|---|---|---|
1 |
ハイ ビームの光錐 |
2 |
前走車のテール ライト |
3 |
画像センサーの前方検知範囲 |
4 |
対向車のヘッドライト |
ハイ ビームの光錐の到達距離は、約 400m です。画像センサーの検知範囲は、約 1000m です。そのためハイ ビームの光錐が対向車を眩惑する前に、画像センサーは対向車を検知することができます。画像センサーが対向車を検知すると、FLA がスイッチ オフのアドバイスを FRM に送信します。FRM がハイ ビームをオフにします。
画像センサーが前走車を検知すると、FLA がスイッチ オフのアドバイスを FRM に送信します。FRM がハイ ビームをオフにします。
画像センサーが周囲の明るさが十分であることを検知すると、FLA がスイッチ オフのアドバイスを FRM に送信します。FRM がハイ ビームをオフにします。十分な明るさとは:
ハイ ビームをロー ビームに切り換える根拠がないときには、FRM がハイ ビームをオンにします。ヘッドライトが増光されます。
FLA が作動すると、ただちにメーター パネルのハイ ビーム アシスタント表示灯(橙色)が点灯します。ハイ ビームが点灯すると、ただちにハイ ビーム表示灯(青色)も点灯します。FLA がシステムの不具合を検知すると、チェック コントロール シンボル マーク(黄色)が表示されます。
以下の状況下では、FLA の機能が制限されることがあります:
ハイ ビーム アシスタントが正常に機能するためには、画像センサーが中心軸に対して平行に調整されている必要があります。夜間走行時には、FLA は左方向に 3° まで、また右方向に 3° まで自動的に調整されます。これにより、中心軸からのわずかなずれを補正します。ハイビーム アシスタントの自動調整のための走行条件は次の通りです:
誤記、誤植が生じる可能性があるため、完全な一致を保証するものではありません、また将来予告なしに技術的変更が加えられることがあります。