Dynamic Drive voorkomt resp. vermindert de bewegingen in dwarsrichting van de auto bij het rijden in bochten. De auto schommelt minder, waardoor het comfort wordt vergroot. Het instuurgedrag van de auto wordt geoptimaliseerd.
De volgende componenten van Dynamic Drive worden beschreven:
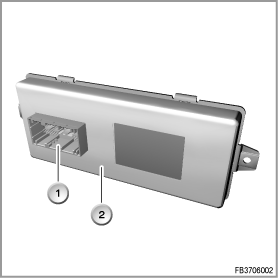
De functies van de regeleenheid worden door een microprocessor uitgevoerd. De regeleenheid wordt via klem 30 van spanning voorzien (met 10 A gezekerd). De regeleenheid wordt geactiveerd via de wekdraad (klem 15).
Index |
Verklaring |
Index |
Verklaring |
|---|---|---|---|
1 |
Stekker Dynamic Drive |
2 |
Regeleenheid Dynamic Drive |
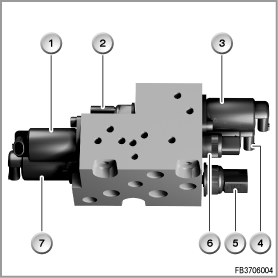
In het kleppenblok zijn de volgende kleppen geïntegreerd:
Het kleppenblok bevindt zich in de wielkast rechtsvoor aan de A-stijl. Het kleppenblok heeft de volgende taken:
Twee drukregelkleppen (een voor de voor- en een voor de achteras) verdelen de oliestroom. De oliestroom gaat dan naar de zwenkmotoren. De druk aan de zwenkmotor van de vooras is groter dan of gelijk aan de druk aan de zwenkmotor van de achteras.
Meting van de werkelijke drukwaarden van de hydraulische vloeistof: Aan de uitgangen van het kleppenblok bevinden zich een druksensor voor de zwenkmotor van de vooras en een druksensor voor de zwenkmotor van de achteras.
De draairichting van de beide zwenkmotoren wordt via een gemeenschappelijke richtingsklep bepaald. De positie van de richtingsklep wordt via een schakelstandherkenningssensor (SSE) herkend en gecontroleerd.
In de volgende gevallen wordt de zwenkmotor van de vooras hermetisch gesloten. Via de terugslagkleppen kan uit de toevoerleiding worden nagezogen.
Via de terugslagkleppen kan uit de toevoerleiding worden nagezogen.
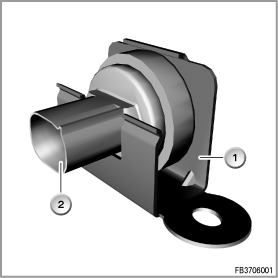
De gemeten dwarsversnelling is de belangrijkste meetgrootheid voor het functioneren van de Dynamic Drive. Het nulpunt van de sensor dwarsversnelling kan via een diagnosecommando in de betreffende servicefunctie door de regeleenheid Dynamic Drive ingeleerd worden.
Index |
Verklaring |
Index |
Verklaring |
|---|---|---|---|
1 |
Sensor dwarsversnelling |
2 |
Stekker dwarsversnellingssensor |
De druksensoren bevinden zich aan het kleppenblok. De nulpuntwaarden van de druksensoren worden via diagnosecommando's in de betreffende servicefunctie door de regeleenheid Dynamic Drive ingeleerd.
De schakelstandsensor bevindt zich aan het kleppenblok en dient ter herkenning van de stand van de richtingsklep.
De drukregelkleppen bevinden zich in het kleppenblok. De drukregelkleppen worden elektrisch aangestuurd. Daarbij wordt de actieve druk voor de voor- en achterasstabilisator ingesteld. Bij recht vooruit rijden zijn de drukregelkleppen stroomloos. De olie kan vrij doorstromen naar het reservoir. Bij het rijden in een bocht worden de kleppen bekrachtigd. De druk in de zwenkmotoren stijgt en wordt naar de richtwaarde gebracht.
De richtingsklep bevindt zich in het kleppenblok. De richtingsklep wordt elektrisch aangestuurd. De richtingsklep bepaalt de richting van de systeemvloeistof bij bochten naar links resp. rechts. De positie van de richtingsklep wordt via een schakelstandherkenningssensor (SSE) gecontroleerd.
De veiligheidsklep bevindt zich in het kleppenblok. De veiligheidsklep wordt elektrisch aangestuurd en sluit stroomloos de zwenkmotor van de vooras af.
De terugslagkleppen bevinden zich in het kleppenblok. De terugslagkleppen laten navullen van olie toe. Hierdoor wordt cavitatie in de zwenkmotor voorkomen.
Index |
Verklaring |
Index |
Verklaring |
|---|---|---|---|
1 |
Richtingsklep |
2 |
Druksensor achteras |
3 |
Proportioneel drukbegrenzingsventiel vooras |
4 |
Proportioneel drukbegrenzingsventiel achteras |
5 |
Druksensor vooras |
6 |
Schakelaarstandsensor |
7 |
Veiligheidsklep |
|
|
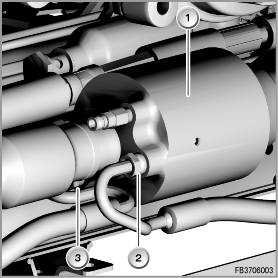
De actieve stabilisatoren zijn in het midden verticaal verdeeld. De actieve stabilisator bestaat uit de zwenkmotor en de aan de zwenkmotor gemonteerde stabilisatorhelften met opgeperste wentellagers. De zwenkmotoras en het zwenkmotorhuis zijn ieder met een helft van de stabilisator verbonden. In de zwenkmotor zijn steeds de twee tegenover elkaar liggende kamers met elkaar verbonden. In de kamers heerst daardoor steeds dezelfde druk. Via een aansluiting worden de twee kamers voorzien van olie onder hoge druk. De beide andere kamers zijn met de retourleiding naar het reservoir verbonden. Door de verschillend hoge drukwaarden ontstaan verschillend grote krachten. Daardoor ontstaat een draaimoment, dat de as tegenover het huis verdraait. Omdat de ene helft van de stabilisator is verbonden met de as en de andere helft met het huis, verdraaien de stabilisatorhelften ten opzichte van elkaar. Het hierdoor verkregen stabiliseringsmoment gaat de rolbewegingen tegen. De systeemdruk kan maximaal 180 bar bedragen.
Index |
Verklaring |
Index |
Verklaring |
|---|---|---|---|
1 |
Zwenkmotor, voor |
2 |
Hydraulische aansluiting |
3 |
Hydraulische aansluiting |
|
|
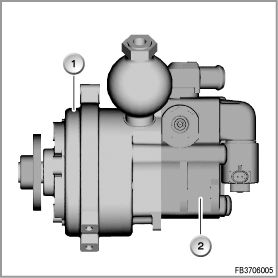
De tandempomp voedt het vloeistofcircuit van de Dynamic Drive en van de stuurbekrachtiging. De pomp bestaat uit een radiale plunjerpomp voor het Dynamic Drive System en een schottenpomp voor de stuurbekrachtiging. Dynamic Drive en de stuurbekrachtiging beschikken over een gemeenschappelijke vloeistofkoeler en reservoir.
Index |
Verklaring |
Index |
Verklaring |
|---|---|---|---|
1 |
Radiale plunjerpomp in de tandempomp |
2 |
Schottenpomp in de tandempomp |
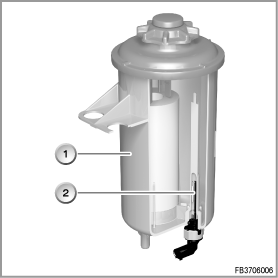
In het vloeistofreservoir zijn een filter en een vloeistofniveausensor geïntegreerd. Indien het vloeistofpeil onder het minimumniveau komt, wordt een signaal gegeven aan de regeleenheid van de Dynamic Drive.
Index |
Verklaring |
Index |
Verklaring |
|---|---|---|---|
1 |
Vloeistofreservoir |
2 |
Vloeistofniveauschakelaar |
De vloeistofkoeler houdt de vloeistoftemperatuur onder 120 graden Celsius. De vloeistoftemperatuur mag gedurende korte tijd tot maximaal 135 graden Celsius stijgen.
De volgende systeemfuncties van Dynamic Drive worden beschreven:
De Dynamic Drive stuurt, afhankelijk van de dwarsversnelling, twee actieve stabilisatoren aan. Daardoor worden slingerbewegingen van de carrosserie bij het rijden in bochten en als gevolg van rijden op slecht wegdek verminderd.
De regeleenheid van de Dynamic Drive berekend uit de ingangssignalen hoe de zwenkmotoren moeten worden aangestuurd. De ingangssignalen worden bovendien op hun aannemelijkheid gecontroleerd en gebruikt voor de bewaking van het systeem.
De belangrijkste regelgrootheid is de dwarsversnelling. Bovendien worden PT-CAN-signalen beoordeeld:
Via deze extra informatie wordt de reactietijd van het systeem verbeterd.
De uitgangen van de regeleenheden zijn kortsluitingbestendig uitgevoerd:
De kleppen worden via een stroomregeling (pulsbreedte-gemoduleerd signaal) aangestuurd. Via PT-CAN wordt aan de DME resp. DDE van de motor medegedeeld of extra vermogen nodig is. Alleen zo kan het opgenomen vermogen, b.v. bij stationair draaien, tijdens de ingebruiknameprocedure gewaarborgd worden.
Dynamic Drive is bij stilstaande auto niet actief. Alle kleppen zijn gesloten. Bij stilstaande auto worden dus door de actieve stabilisatoren geen momenten gegenereerd. Een scheefstaande auto (bijv.: trottoir of ongelijkmatige belading) heeft ondanks een meetbare dwarsversnelling geen regeling tot gevolg. Vanaf circa 15 km/h is de Dynamic Drive actief.
Waarschuwing! Rolbeweging bij de ingebruikname
De auto maakt tijdens de ingebruikname sterke en snelle rolbewegingen. Om deze reden mogen er geen personen direct bij de auto, vooral niet in de buurt van bewegende delen van de auto zijn. Er mogen geen voorwerpen onder de auto of in de wielkasten aanwezig zijn! De ingebruikname mag uitsluitend worden uitgevoerd, wanneer de auto met alle wielen op een stevige ondergrond staat. In geen geval mag de ingebruikname op
worden uitgevoerd. Indien deze punten niet in acht worden genomen, bestaat levensgevaar!
Na het openen van het hydraulisch systeem, dus bij werkzaamheden aan
Moet een ingebruikname worden uitgevoerd. Na het coderen of programmeren van de Dynamic Drive regeleenheid is bovendien een ingebruikname noodzakelijk.
Ingebruikneming
De ingebruikname dient voor het inleren van de parameters en de nulpunten van alle sensoren. De ingebruikname bestaat uit 5 fasen en duurt circa 25 seconden.
Opmerking! Temperatuur bij ingebruikname
De vloeistoftemperatuur is een belangrijke waarde voor de ingebruiknameprocedure. De ingebruiknameprocedure (via een diagnosecommando) mag niet worden uitgevoerd bij extreme temperaturen (omgevings- en systeemtemperatuur).
Na het coderen of programmeren van de regeleenheid moet een ingebruikname worden uitgevoerd.
De volgende waarschuwingen en hun oorzaken kunnen als Check-Control-meldingen in het CID verschijnen:
Bij de waarschuwingen:
Is het Dynamic Drive systeem uitgeschakeld.
Attentie, de auto rolt in bochten meer dan een auto zonder Dynamic Drive-systeem. Voorwaarde voor verder rijden naar de dichtstbijzijnde servicewerkplaats:
Mogelijke oorzaken voor de waarschuwing:
Om de oorzaak beter te kunnen lokaliseren, storingsgeheugen uitlezen en het weergegeven controleschema afhandelen. Wanneer de storing verholpen is, storingsgeheugen wissen.
Bij de waarschuwing:
wordt de bestuurder geïnformeerd, dat zijn auto een olielekkage in het onderstel- en stuurbekrachtigingssysteem heeft.
Verder rijden naar de dichtstbijzijnde werkplaats is in dit geval niet mogelijk.
Mogelijke oorzaken voor de waarschuwing:
Om de oorzaak beter te kunnen lokaliseren, storingsgeheugen uitlezen en het weergegeven controleschema afhandelen. Wanneer de storing verholpen is, storingsgeheugen wissen.
Bij de waarschuwing:
wordt de bestuurder geïnformeerd dat de stabilisatie van de auto door Dynamic Drive is beperkt, maar dat wel kan worden verder gereden.
Bij de volgende gelegenheid moet contact met een werkplaats worden opgenomen.
Mogelijke oorzaken voor de waarschuwing:
Om de oorzaak beter te kunnen lokaliseren, storingsgeheugen uitlezen en het weergegeven controleschema afhandelen. Wanneer de storing verholpen is, storingsgeheugen wissen.
Drukfouten, vergissingen en technische wijzigingen voorbehouden.