Com o E92 é introduzida uma direcção assistida electromecânica (EPS: Electronic Power Steering) no BMW Série 3. Assim, a EPS é introduzida com o motor diesel M57TU2 em 09/2006. Pouco a pouco, a EPS é introduzida como medida CO2 em todos os outros modelos.
A direcção assistida electromecânica (EPS) distingue-se de uma direcção assistida convencional através da assistência à força de direcção. A EPS apoia o condutor através de um servomotor eléctrico em vez de um accionamento hidráulico.
O servomotor só está activo quando é dirigido. Deste modo, o servomotor não consome potência em marcha a direito.
A direcção assistida electromecânica oferece as seguintes vantagens:
No E92, o accionamento para a EPS está disposto paralelamente ao eixo. A disposição paralela ao eixo apresenta vantagens em relação a disposições no pinhão ou na coluna da direcção. A disposição paralela ao eixo apresenta vantagens em relação às forças da barra da direcção alcançáveis, ao comportamento vibratório, assim como à acústica.
Índice |
Explicação |
Índice |
Explicação |
|---|---|---|---|
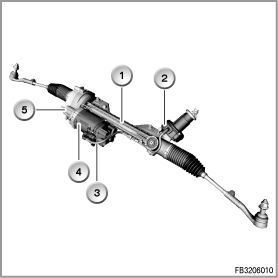
1 |
Cremalheira |
2 |
Sensor do binário da força no volante |
3 |
Unidade de comando |
4 |
Servomotor |
5 |
Engrenagem redutora |
|
|
São descritos os seguintes componentes para a direcção assistida electromecânica:
A unidade assistida é constituída pelos seguintes componentes:
A unidade de comando EPS é um componente da direcção assistida electromecânica. A unidade de comando EPS está conectada à rede de bordo com 2 fichas de ligação.
O sensor do binário da força no volante está conectado à unidade de comando EPS através de outra ficha de ligação.
Na unidade de comando EPS encontram-se memorizadas várias curvas características para a direcção assistida, retorno activo da direcção e a característica de amortecimento. Dos valores calculados a partir dos valores de entrada, em combinação com a respectiva curva característica, resulta a assistência à força de direcção necessária.
O porta-fusíveis atrás (compartimento da mala) alimenta a unidade assistida com o borne 30.
Índice |
Explicação |
Índice |
Explicação |
|---|---|---|---|
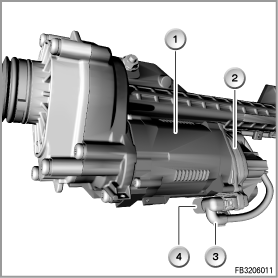
1 |
Servomotor |
2 |
Unidade de comando EPS |
3 |
Ficha de ligação para o sensor do binário da força no volante |
4 |
Ficha de ligação para a rede de bordo |
O servomotor é um motor de corrente contínua síncrono e sem colector (íman permanente). O servomotor acciona a engrenagem redutora. Deste modo, é transmitida a potência do servomotor para a cremalheira.
Na placa de circuitos da unidade de comando existem 2 sensores de posição do motor (redundância). Ambos os sensores utilizam o princípio do efeito de Hall (sensor Hall com roda magnética). A roda magnética está fixada no veio do motor.
O sensor de posição do motor 1 determina a posição do servomotor. O sonda fornece um sinal seno e um sinal co-seno. A partir dos sinais é determinada a posição do rotor do servomotor. O sensor de posição do motor 2 serve de controlo (verificação da plausibilidade).
Ambos os sensores são alimentados pela unidade de comando EPS com tensão.
A caixa redutora transmite a potência do servomotor para a cremalheira. A relação de rotações entre o servomotor e o volante é de cerca de 21:1.
A caixa redutora é composta por uma transmissão por correia e uma transmissão da rosca esférica. A transmissão da rosca esférica tem uma subida de 7 mm por rotação.
O servomotor acciona a correia dentada. A transmissão por correia tem uma redução de 2,85:1. A correia dentada acciona a transmissão da rosca esférica. A transmissão da rosca esférica dispõe de uma recondução esférica interna (5 rotações). A transmissão da rosca esférica é optimizado em termos de ruído.
Índice |
Explicação |
Índice |
Explicação |
|---|---|---|---|
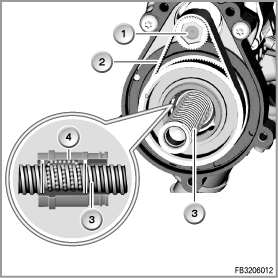
1 |
Veio primário do servomotor |
2 |
Correia dentada |
3 |
Cremalheira |
4 |
Corrente de esferas |
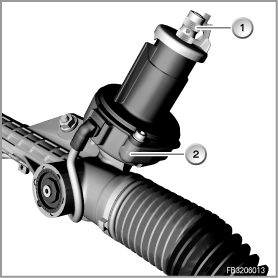
O sensor do binário da força no volante recolhe de forma digital o binário da força no volante aplicado pelo condutor. A área de trabalho corresponde a 4 voltas do volante (corresponde a 1440°).
Índice |
Explicação |
Índice |
Explicação |
|---|---|---|---|
1 |
Pinhão com barra de torção |
2 |
Sensor do binário da força no volante |
No sensor do binário da força no volante existem 2 sensores (redundância). Ambos os sensores utilizam o princípio do efeito de Hall (sensor Hall com roda magnética).
Através do binário da força no volante, a barra de torção torce. Assim, a barra de torção transmite o binário da força ao volante no pinhão.
Ambos os sensores fornecem um sinal seno e um sinal co-seno. A partir dos sinais determina-se o binário da força no volante aplicado do condutor. Ambos os sensores trabalham independentemente uns dos outros. O 2.º sensor existe devido à disponibilidade mais elevada do sistema (redundância).
Os sensores digitalizam os dados determinados. Os sinais são transmitidos através de uma ligação bifilar redundante.
Ambos os sensores são alimentados pela unidade de comando EPS com tensão.
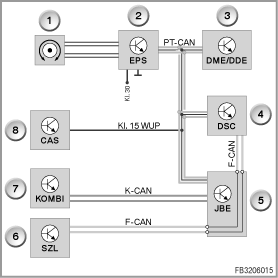
As seguintes unidades de comando comunicam com a direcção assistida electromecânica:
Índice |
Explicação |
Índice |
Explicação |
|---|---|---|---|
1 |
Sensor do binário da força no volante |
2 |
Unidade de comando EPS |
3 |
Electrónica Digital do Motor (DME) ou Electrónica Digital Diesel (DDE) |
4 |
Controlo dinâmico da estabilidade (DSC) |
5 |
Electrónica da caixa de junções (JBE) |
6 |
Comandos na coluna da direcção (SZL) |
7 |
Instrumento combinado (KOMBI) |
8 |
Sistema de acesso à viatura (CAS) |
F-CAN |
CAN da suspensão |
K-CAN |
CAN da carroçaria |
Kl. 15 WUP |
Borne 15 linha de reactivação (Wake-up) |
PT-CAN |
Powertrain CAN |
O controlo da estabilidade de marcha fornece a velocidade de marcha sob a forma de sinal de canal. Para o efeito, a respectiva unidade de comando está conectada com a EPS através da PT-CAN (Powertrain CAN).
Nos comandos na coluna da direcção (SZL) está integrado o sensor de guinada. O sensor de guinada fornece o ângulo de viragem sob a forma de sinal. O sinal do sensor de guinada é plausibilizado contra o sinal do sensor de posição do motor. Para o caso de um desvio demasiado grande, a assistência à força de direcção desactiva-se com um registo na memória de falhas.
O ângulo de viragem e a velocidade angular de guinada é calculada pela EPS a partir do sinal do sensor de posição do motor. O sinal do sensor de guinada só é necessário para a inicialização e verificação da plausibilidade.
Os comandos na coluna da direcção estão conectados através da PT-CAN.
A gestão electrónica do motor fornece o sinal ”Motor a trabalhar” à PT-CAN. Para determinadas condições de funcionamento (p. ex., arranque do motor) são necessárias as rotações como sinal.
Em caso de avaria da direcção assistida electromecânica (EPS) aparece um símbolo amarelo do Check-Control no display de cristais líquidos. Simultaneamente acende-se a luz de controlo fixa no instrumento combinado.
O símbolo do Check-Control tem o seguinte significado:
”EPS sem função”

Índice |
Explicação |
Índice |
Explicação |
|---|---|---|---|
1 |
Instrumento combinado |
2 |
Luz de controlo e símbolo do Check-Control |
As possíveis causas para o acendimento da mensagem do Check-Control podem ser:
Estão descritas as seguintes funções do sistema para a direcção assistida electromecânica (EPS):
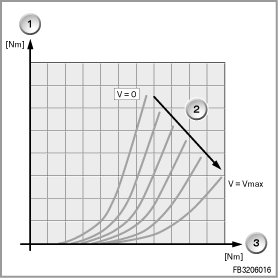
No sistema está integrada a Servotronic, a regulação electrónica da assistência à força de direcção é comandada em função da velocidade. A unidade de comando EPS determina a assistência necessária à força de direcção a partir de vários valores de entrada.
Índice |
Explicação |
Índice |
Explicação |
|---|---|---|---|
1 |
Binário da assistência à força de direcção |
2 |
Velocidade de deslocação |
3 |
Binário da força no volante aplicado pelo condutor |
|
|
Na unidade de comando estão registados os mapas característicos para as características de assistência e de amortecimento. Dos valores calculados a partir dos valores de entrada, em combinação com a curva característica, resulta a assistência necessária à força de direcção. A assistência à força de direcção é aplicada pelo servomotor e pela caixa redutora.
Valores de entrada importantes para a assistência à força de direcção:
A EPS adapta o desvio dos sinais do sensor de posição do motor e do sensor de guinada (p. ex., rodovia torta em caso de marcha a direito).
O retorno activo da direcção reconduz a direcção, após uma curva, novamente para a colocação a direito desde que o condutor não aplique nenhum binário da força no volante. Para isso, a unidade de comando EPS precisa do ângulo de viragem do sensor de guinada. O retorno activo da direcção assegura um retorno da direcção harmónico através de toda a temperatura de funcionamento. É importante um retorno activo da direcção a partir das posições finais, em especial com temperaturas frias. Deste modo, o conforto de operação aumenta.
No retorno da direcção activo está integrado um amortecimento de oscilação.
Informações sobre a rodovia são, p. ex., alterações dos valores de fricção ou constituição. A EPS determina esta informação através de uma alteração do binário da força no volante.
A partir dos seguintes factores é calculada a aceleração no eixo dianteiro:
Daí a EPS calcula, por seu lado, uma parte do binário da força no volante para a resposta activa da rodovia.
Em caso de sobretensão superior a 17 V, a assistência à força de direcção desactiva-se. A unidade de comando EPS memoriza um defeito. Um símbolo do Check-Control acende-se no instrumento combinado. Quando a tensão baixar novamente para valores inferiores a 16 V, a assistência à força de direcção regressa ao valor exigido. O símbolo do Check-Control apaga-se quando se alcança 100 % da assistência à força de direcção exigida.
No caso de uma subtensão inferior a 10,5 V, a potência do motor reduz-se linearmente até 9 V. Abaixo de 9 V já não se realiza nenhuma assistência à força de direcção. A mensagem do Check-Control é emitida em 40 % da assistência à força de direcção (com registo na memória de falhas). Quando a tensão aumentar novamente para valores superiores a 10 V, a assistência à força de direcção regressa ao valor exigido. O símbolo do Check-Control apaga-se quando se alcança 100 % da assistência à força de direcção exigida.
Como protecção contra temperatura excessiva, a EPS reduz o binário nominal do motor em função da temperatura do estágio final entre 0 e 100 %. Assim, a unidade de comando EPS efectua a redução nos seguintes níveis:
A EPS detecta sobrecarga ao desprender do bordo do passeio. Os seguintes sinais entram na identificação:
A EPS tem como função de software, à esquerda e à direita um batente final. Deste modo, protegem-se os batentes finais mecânicos (tampões) do desgaste precoce. A função de software utiliza os seguintes sinais para o cálculo dos batentes finais:
Atenção! Adaptar os batentes finais.
Após uma substituição da direcção, é necessário adaptar de novo as batentes finais da caixa de direcção.
Os batentes finais mal adaptados podem causar a supressão repentina da assistência à força de direcção.
As seguintes condições devem estar cumpridas durante a adaptação dos batentes finais:
Durante a adaptação dos batentes finais, deve virar-se o volante uma vez, lentamente e completamente, para a esquerda e direita. A velocidade de direcção deve situar-se abaixo de 1 volta do volante por cada segundo. Nos batentes finais, aumentar lentamente a força no volante, até o volante já não rodar.
Após cerca de 5 segundos, apaga-se a luz de controlo e o símbolo do Check-Control no instrumento combinado.
No sistema de diagnóstico BMW, encontra-se disponível a seguinte função especial:
Com esta função especial são eliminados os valores para os batentes finais (p. ex., após a adaptação defeituosa). Simultaneamente elimina-se o desvio em relação ao ângulo de viragem.
Após uma substituição, a unidade de comando EPS deve ser codificada.
A assistência à força de direcção é activada nas seguintes condições:
Quando o motor estiver desligado e a velocidade de deslocação for 0, a assistência à força de direcção é desactivada.
Reserva-se o direito a erros de impressão, lapsos e alterações técnicas.