E92 стал первой моделью BMW 3-й серии, у которой появился электромеханический усилитель рулевого привода (EPS: Electronic Power Steering). С 09/2006 EPS будет устанавливаться на моделях с дизельным двигателем M57TU2. Позднее в рамках снижения содержания CO2 в выхлопе он будет внедрен на всех остальных моделях.
Электромеханический усилитель рулевого привода (EPS) отличается от традиционного гидроусилителя рулевого привода. В EPS помощь водителю оказывает не гидравлический привод, а электродвигатель.
Серводвигатель активен только тогда, когда водитель поворачивает рулевое колесо. Благодаря этому отсутствует потребление мощности серводвигателем при движении по прямой.
Электромеханический усилитель рулевого привода имеет следующие преимущества:
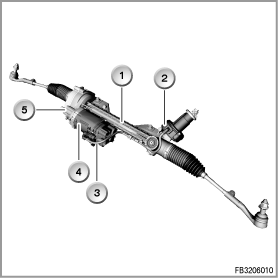
На E92 привод EPS расположен параллельно оси. Такое расположение имеет преимущества по сравнению с расположением на ведущей шестерне или рулевой колонке, затрагивающие максимальные силы на рулевых тягах, склонность к вибрациям и шумность.
Индекс |
Пояснение |
Индекс |
Пояснение |
|---|---|---|---|
1 |
Зубчатая рейка |
2 |
Датчик момента на рулевом колесе |
3 |
Блок управления |
4 |
Серводвигатель |
5 |
Понижающий редуктор |
|
|
Ниже описываются следующие узлы в составе электромеханического усилителя рулевого привода:
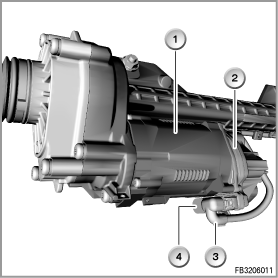
Сервоблок состоит из следующих узлов:
Блок управления EPS является составной частью электромеханического усилителя рулевого привода. Блок управления EPS соединен с бортовой сетью с помощью 2 разъемов.
Датчик момента на рулевом колесе в свою очередь соединен с блоком управления EPS с помощью еще одного разъема.
В блоке управления EPS записаны несколько графических характеристик для функций усиления момента поворота и активного возврата рулевого колеса в исходное положение, а также демпфирования. Рассчитанные на основе входных параметров значения в сочетании с соответствующей графической характеристикой и дают необходимое усиление момента поворота.
От задней колодки предохранителей (в багажнике) на сервоблок подается напряжение питания от контакта 30.
Индекс |
Пояснение |
Индекс |
Пояснение |
|---|---|---|---|
1 |
Серводвигатель |
2 |
Блок управления EPS |
3 |
Разъем подключения к датчику момента на рулевом колесе |
4 |
Разъем подключения к бортовой сети |
Серводвигатель представляет собой бесколлекторный, синхронный двигатель постоянного тока (постоянный магнит). Серводвигатель приводит понижающий редуктор. При этом момент передается от серводвигателя на зубчатую рейку.
На плате блока управления находятся 2 датчика положения якоря электродвигателя (для резерва). Оба датчика работают по принципу Холла (датчик Холла с магнитным колесом). Магнитное колесо находится на валу двигателя.
Датчик 1 измеряет положение якоря серводвигателя. Этот датчик передает синусоидальный и косинусоидальный сигналы. По этим сигналам вычисляется положение якоря серводвигателя. Датчик 2 служит для контроля (проверки достоверности).
Напряжение к обоим датчикам подается от блока EPS.
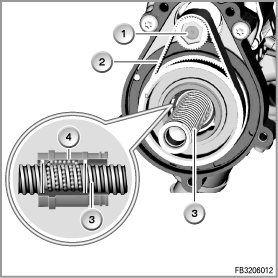
Понижающий редуктор передает момент серводвигателя на зубчатую рейку. Передаточное отношение между серводвигателем и рулевым колесом составляет 21:1.
Понижающий редуктор состоит из ременного привода и шарико-винтовой передачи. Ход шарико-винтовой передачи составляет 7 мм на оборот.
Серводвигатель приводит зубчатый ремень. Передаточное отношение ременной передачи составляет 2,85:1. Зубчатый ремень приводит шарико-винтовую передачу. Шарико-винтовая передача имеет внутренним устройством возврата шарика (через 5 оборотов). Шарико-винтовая передача оптимизирована по шуму.
Индекс |
Пояснение |
Индекс |
Пояснение |
|---|---|---|---|
1 |
Приводной вал серводвигателя |
2 |
Зубчатый ремень |
3 |
Зубчатая рейка |
4 |
Шариковая цепь |
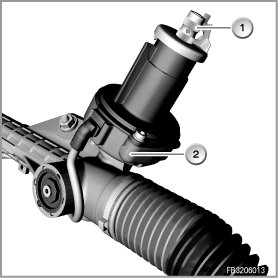
Датчик служит для цифрового измерения момента, прикладываемого водителем к рулевому колесу. Рабочий диапазон составляет 4 оборота рулевого колеса (соответствует 1440°).
Индекс |
Пояснение |
Индекс |
Пояснение |
|---|---|---|---|
1 |
Ведущая шестерня с торсионом |
2 |
Датчик момента на рулевом колесе |
Датчик момента на рулевом колесе состоит собственно из 2 датчиков (один резервный). Оба датчика работают по принципу Холла (датчик Холла с магнитным колесом).
Под действием момента на рулевом колесе закручивается торсион. При этом торсион передает момент на ведущую шестерню.
Оба датчика передают один синусоидальный и один косинусоидальный сигналы. По этим сигналам вычисляется момент, прикладываемый водителем к рулевому колесу. Датчики работают независимо друг от друга. Второй датчик - резервный. Он нужен для надежности системы.
Датчики оцифровывают полученные данные. Сигналы передаются по резервной двухжильной линии.
Напряжение к обоим датчикам подается от блока EPS.
Электромеханический усилитель руля обменивается данными также со следующими блоками управления:
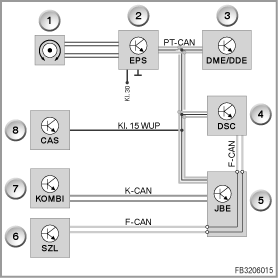
Индекс |
Пояснение |
Индекс |
Пояснение |
|---|---|---|---|
1 |
Датчик момента на рулевом колесе |
2 |
Блок управления EPS |
3 |
Цифровая электронная система управления двигателем (DME) или цифровая электронная система управления дизельным двигателем (DDE) |
4 |
Система динамического контроля стабильности (DSC) |
5 |
Электронный блок управления JBE |
6 |
Коммутационный центр в рулевой колонке (SZL) |
7 |
Комбинация приборов (KOMBI) |
8 |
Система доступа в автомобиль (CAS) |
F-CAN |
Шина CAN ходовой части |
K-CAN |
Кузовная шина CAN |
Kl. 15 WUP |
Контакт 15, пробуждающий провод (Wake-Up) |
PT-CAN |
Шина CAN двигателя и трансмиссии |
Система контроля стабильности передает значение скорости движения в виде сигнала по шине. Для этого соответствующий блок управления соединен с EPS шиной PT-CAN.
В SZL встроен датчик угла поворота рулевого колеса. Датчик угла поворота рулевого колеса передает значение угла поворота рулевого колеса в виде сигнала по шине. Сигнал датчика угла поворота рулевого колеса сравнивается с сигналом датчика положения якоря электродвигателя для проверки его достоверности. При слишком большом отклонении усилитель руля отключается и в ЗУ записывается код неисправности.
Угол и скорость поворота рулевого колеса блок EPS рассчитывает по сигналу датчика положения якоря электродвигателя. Сигнал датчика поворота рулевого колеса требуется только для инициализации и проверки достоверности.
Блок SZL подсоединен через шину PT-CAN.
Система управления двигателем передает сигнал ”Двигатель работает” по шине PT-CAN. При некоторых условиях (например - при пуске двигателя) требуется (в виде сигнала) значение оборотов двигателя.
В случае отказа EPS на ЖК-дисплее появляется желтый значок автоматической диагностики. Одновременно в комбинации приборов загорается контрольная лампа.
Значок автоматической диагностики имеет следующее значение:
”EPS не работает”

Индекс |
Пояснение |
Индекс |
Пояснение |
|---|---|---|---|
1 |
Комбинация приборов |
2 |
Контрольная лампа и значок автоматической диагностики |
Возможные причины появления сообщения автоматической диагностики:
Ниже описываются следующие функции электромеханического усилителя рулевого привода (EPS):
В EPS встроен сервотроник, представляющий собой электронную систему регулировки усиления момента поворота в зависимости от скорости движения. Блок управления EPS определяет требуемую степень усиления момента поворота на основе различных входных параметров.
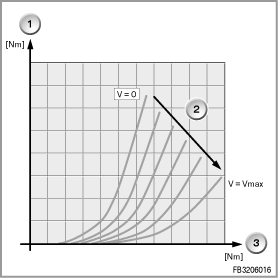
Индекс |
Пояснение |
Индекс |
Пояснение |
|---|---|---|---|
1 |
Момент усиления |
2 |
Скорость движения |
3 |
Прикладываемый водителем момент |
|
|
В блоке управления заложены характеристики усиления и демпфирования. Рассчитанные на основе входных параметров значения в сочетании с соответствующей графической характеристикой и дают необходимое усиление момента поворота. Серводвигатель и понижающий редуктор усиливают момент, прикладываемый водителем.
Важные входные параметры для усилителя рулевого привода:
EPS подстраивает друг под друга сигналы от датчика положения якоря электродвигателя и датчика угла поворота рулевого колеса (например - изгиб дороги при движении прямо).
После поворота рулевое управление возвращается в положение для движения по прямой, когда водитель отпускает рулевое колесо. Для этого блок управления EPS должен знать измеряемый датчиком угол поворота рулевого колеса. Функция активного возврата рулевого колеса в исходное положение обеспечивает плавный возврат рулевого управления в исходное положение при любой рабочей температуре. Особенно важен возврат руля из крайних положений в исходное при низких температурах. Это повышает комфортность управления.
У активное устройство возврата рулевого колеса встроен гаситель колебаний.
Рулевое управление дает водителю такую информацию о дороге, как, например, качество покрытия или характер сцепления шин с дорожным полотном. EPS передает эту информацию изменением момента поворота управляемых колес.
По следующим величинам рассчитывается ускорение передних колес:
По ускорению передних колес EPS рассчитывает долю момента для активного информирования.
При повышении напряжения выше 17 В система усилитель руля отключается. В блок управления EPS записывается соответствующий код неисправности. В комбинации приборов загорается значок автоматической диагностики. Когда напряжение снова падает до 16 В, усилитель возвращается к запрашиваемому в данный момент значению. Значок системы автоматической диагностики гаснет при достижении 100 % от запрашиваемого усиления.
При напряжении ниже 10,5 В мощность электродвигателя линейно снижается до 9 В. При напряжении менее 9 В усилитель руля не работает. Сообщение автоматической диагностики высвечивается при усилении в 40 % (в ЗУ записывается код неисправности). Когда напряжение снова повышается до 10 В, усиление возвращается к текущему запрашиваемому значению. Значок системы автоматической диагностики гаснет при достижении 100 % от запрашиваемого усиления.
Для защиты от перегрева EPS снижает заданный момент электродвигателя в зависимости от температуры выходного каскада от 0 до 100 %. При этом блок EPS осуществляет снижение ступенчато:
EPS распознает перегрузку при отжимании от кромки бордюрного камня. При этом используются следующие сигналы:
В EPS используются виртуальные упоры (крайние положения). Это позволяет защитить механические упоры (буферы) от преждевременного износа. Для расчета упоров программному обеспечению требуются следующие сигналы:
Внимание! Провести запоминание крайних положений.
После замены рулевого управления необходимо снова запомнить крайние положения (упоры).
Если упоры запомнены неправильно, то это может привести к внезапному исчезновению усиления в крайнем положении.
При запоминании крайних положений должны быть выполнены следующие условия:
При запоминании упоров необходимо медленно до конца вывернуть рулевое колесо один раз влево (против часовой стрелки) и один раз вправо (по часовой стрелке). Скорость поворота рулевого колеса должна быть ниже 1 оборота в секунды. Дойдя до крайнего положения, медленно увеличить прикладываемое к рулевому колесу усилие до полного упора.
Примерно через 5 секунд в комбинации приборов гаснут контрольная лампа и значок автоматической диагностики.
В фирменном тестере BMW предусмотрена следующая сервисная функция:
С помощью этой сервисной функции стираются значения упоров (например, при неправильно выполненном запоминании). Одновременно стирается значение отклонение от угла поворота рулевого колеса.
После замены блок управления EPS следует закодировать.
Усилитель руля включается при следующих условиях:
Когда двигатель не работает и скорость ровна нулю, усилитель руля выключается.
Оставляем за собой право на опечатки, смысловые ошибки и технические изменения.