Indicación SA 5DF en función del país solo en combinación con determinados equipos opcionales.
El control de crucero activo con función Stop&Go en la actualidad solo se encuentra disponible con SA 205 ”Caja de cambio automático” o con SA 2TB ”Caja de cambio automático deportivo”.
En algunos mercados se ofrece el ACC sin función Stop&Go debido a las limitaciones de homologación.
ACC sin función Stop&Go se diferencia solo por la falta de los sensores de corto alcance.
En Europa el equipo opcional 5DF solo se ofrece en combinación con el sistema de navegación. Motivo: Desconexión obligatorio por ley al aproximarse a estaciones radioastronómicas.
Índice |
Explicación |
Índice |
Explicación |
|---|---|---|---|
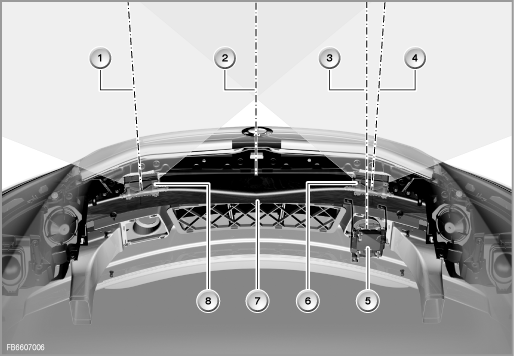
1 |
Eje central del sensor de corto alcance izquierdo |
2 |
Eje longitudinal del vehículo |
3 |
Eje central del sensor de largo alcance |
4 |
Eje central del sensor de corto alcance derecho |
5 |
Sensor de largo alcance con soporte |
6 |
Sensor de corto alcance derecho con soporte |
7 |
Soporte del paragolpes |
8 |
Sensor de corto alcance izquierdo con soporte |
Deben observarse las siguientes indicaciones para el Servicio Posventa:
El siguiente texto describe el nuevo control de crucero activo con función Stop&Go (equipo opcional 5DF).
El control de crucero activo con función Stop&Go es una ampliación del hasta ahora conocido control de crucero activo (ACC).
Como complemento al control de crucero activo conocido la función Stop&Go facilita:
La velocidad de crucero se puede seleccionar dentro de un margen de 30 km/h hasta 180 km/h: en secuencias confortables de 10 o en secuencias afinadas de 1. La velocidad de crucero se muestra en el cuadro de instrumentos. Además, existe la posibilidad de elegir entre 4 distancias.
Con el nuevo equipo opcional también se utiliza un subbus nuevo: Sensor CAN (CAN S).
Se describen los siguientes componentes del ACC:
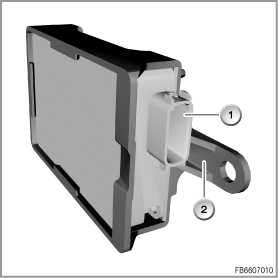
Los sensores de corto alcance son sensores de radar (Short Range Radar).
Par el ACC con función Stop&Go se encuentran integrados dos sensores de corto alcance idénticos. Los sensores de corto alcance se encuentran montados en el soporte del paragolpes delantero con una sujeción de plástico.
Índice |
Explicación |
Índice |
Explicación |
|---|---|---|---|
1 |
Sensor de corto alcance |
2 |
Soporte |
Los sensores de corto alcance se encuentran unidos a la unidad de mando LDM a través del sensor CAN (CAN S).
Los sensores de corto alcance tienen la siguiente función:
Los datos del objeto de los sensores de corto alcance se utilizan solamente para la función Stop&Go del ACC (no para el asistente de frenado autoadaptable).
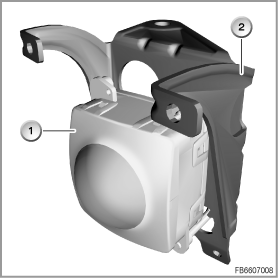
LRR significa Long Range Radar.
Índice |
Explicación |
Índice |
Explicación |
|---|---|---|---|
1 |
Sensor de largo alcance |
2 |
Soporte |
El sensor de largo alcance (el antiguo sensor ACC) es un sensor de radar. El sensor de largo alcance es a la vez una unidad de mando. Con ello el sensor de largo alcance dispone de una dirección de unidad de mando y es capaz de diagnosticar y programar.
Un sensor de largo alcance recoge la distancia y el ángulo, así como la velocidad de objetos en movimiento. La distancia detectada es de hasta 150 metros delante del vehículo. En la unidad de mando LDM (gestión de la dinámica longitudinal) se procesan estos datos.
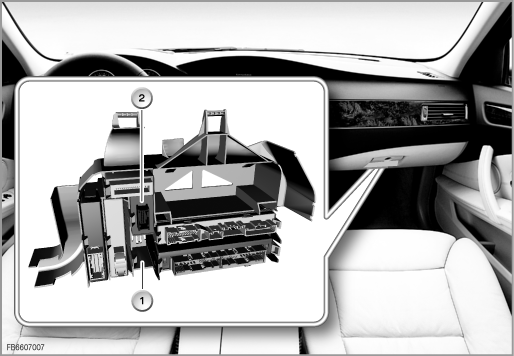
La unidad de mando para la gestión de la dinámica longitudinal se encuentra montada sobre el soporte de equipos detrás de la guantera.
Índice |
Explicación |
Índice |
Explicación |
|---|---|---|---|
1 |
Soporte de equipos |
2 |
Unidad de mando LDM |
La unidad de mando LDM se encarga de las siguientes tareas del ACC con función Stop&Go:
La unidad de mando CAS alimenta al LRR y a la unidad de mando LDM con una línea de reactivación propia, desacoplada eléctricamente de la línea de reactivación convencional. Esta solución se adoptó porque el sensor de largo alcance se encuentra montado en una zona expuesta a los accidentes (parte frontal del vehículo). Gracias a esta solución, las consecuencias sobre otras unidades de mando se mantienen dentro de unos límites en el caso de que se dañe la línea de reactivación del LRR (p. ej., cortocircuito a masa) en un accidente.
El nuevo sensor CAN (CAN S) combina:
El CAN S fue necesario debido a la gran cantidad de datos de los sensores de radar.
Esta cantidad de datos hubiese sobrepasado la capacidad de transmisión libre de los sistemas de bus existentes.
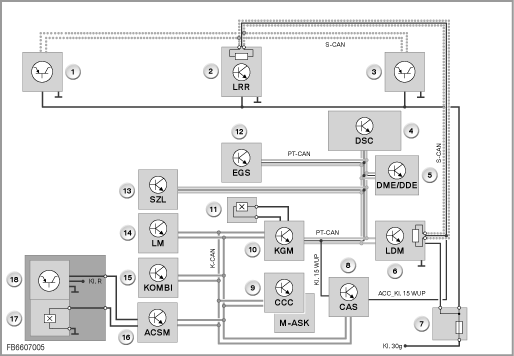
Índice |
Explicación |
Índice |
Explicación |
|---|---|---|---|
1 |
Sensor de corto alcance izquierdo |
2 |
Sensor de largo alcance (LRR) |
3 |
Sensor de corto alcance derecho |
4 |
Control dinámico de la estabilidad (DSC) |
5 |
Electrónica Digital del Motor (DME) o bien Electrónica Digital Diesel (DDE) |
6 |
Gestión del dinamismo longitudinal (LDM) |
7 |
Fusible en el maletero |
8 |
Car Access System (CAS) |
9 |
Car Communication Computer (CCC) y controlador del sistema multiaudio (M-ASK) |
10 |
Módulo de carrocería y gateway (KGM) |
11 |
Contacto de puerta del conductor |
12 |
Mando electrónico del cambio (EGS) |
13 |
Centro de mandos en la columna de dirección (SZL) |
14 |
Módulo de luces (LM) |
15 |
Cuadro de instrumentos (KOMBI) |
16 |
Módulo avanzado de colisiones y seguridad (ACSM) |
17 |
Contacto de cierre de cinturón |
18 |
Estera de detección de asiento ocupado |
Características del sensor CAN:
Se describen las siguientes funciones del sistema:
Para la transformación de la función Stopp&Go se requiere una compleja interconexión del sistema con funciones compartidas en otras unidades de mando. La unidad de mando LDM está conectada mediante buses de datos con estas unidades de mando.
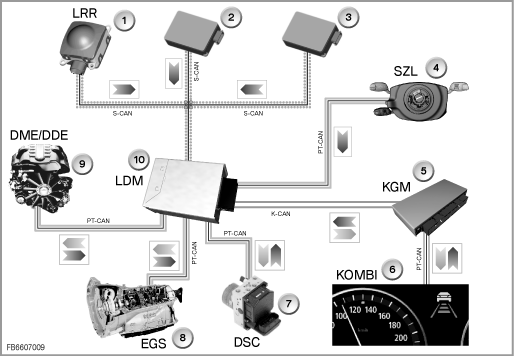
Índice |
Explicación |
Índice |
Explicación |
|---|---|---|---|
1 |
Sensor de largo alcance (LRR) |
2 |
Sensor de corto alcance izquierdo |
3 |
Sensor de corto alcance derecho |
4 |
Centro de mandos en la columna de dirección (SZL) |
5 |
Módulo de carrocería y gateway (KGM) |
6 |
Cuadro de instrumentos (KOMBI) |
7 |
Control dinámico de la estabilidad (DSC) |
8 |
Mando electrónico del cambio (EGS) |
9 |
Electrónica Digital del Motor (DME) o bien Electrónica Digital Diesel (DDE) |
10 |
Gestión del dinamismo longitudinal (LDM) |
Para la función completa se conectan las siguientes unidades de mando:
Unidad de mando |
Funcionamiento |
|---|---|
DME o DDE: Mando del motor |
La transformación de la demanda de par Señal ”Motor en marcha” |
DSC: Control dinámico de la estabilidad |
Situación de marcha Transformación de las actuaciones sobre los frenos |
SZL: Central de conmutación de la columna de dirección |
Palanca de mando Ángulo de la dirección Accionamiento de las bocinas |
CCC, M-ASK: sistema de navegación, |
Datos del sistema de navegación (actuación sobre las magnitudes de regulación) |
KOMBI: Cuadro de instrumentos |
Representación de las indicaciones (ACC y avisos del Check-Control) |
EGS: Mando del cambio |
Gama de marcha |
CAS: Car Access System |
Estado de los bornes y línea de reactivación |
KGM: Módulo de carrocería y gateway |
Contacto de puerta (intención de descender del conductor) |
AHM: Módulo para remolque |
Detección del funcionamiento del remolque |
ACSM. Modulo de seguridad anticolisión |
Ocupación del asiento del conductor (intención de descender del conductor) Contacto del cierre del cinturón (intención de descender del conductor) |
RLS: Sensor de lluvia y luminosidad |
Estado de la calzada (agua) |
SZM: Central de conmutación en la consola central |
Tecla DTC |
LM: Módulo de luces |
Accionamiento del sistema de intermitentes de emergencia |
El asistente de frenado autoadaptable es una función de DSC. Para ello la unidad de mando LDM es el gateway del CAN S al PT-CAN.
El mayor beneficio del asistente de frenado autoadaptable se obtiene en situaciones de emergencia. Cuando el conductor del coche que circula delante frena bruscamente, el sensor de largo alcance detecta la situación.
El asistente de frenado ayuda a ejecutar el frenado de forma óptima y evitar así en el mejor de los casos una colisión.
Para ello existen las siguientes funciones:
El asistente de frenado autoadaptable se encuentra siempre encendido con el ACC activado.
El asistente de frenado autoadaptable también está disponible para el ACC sin la función Stop&Go.
Si se alcanzan los límites funcionales del ACC, puede presentarse un comportamiento del sistema inexplicable para el conductor. A continuación se describen dichas situaciones:
Salvo error u omisión; sujeto a modificaciones técnicas.