Con el E92 se introduce una servodirección electromecánica (EPS: Electronic Power Steering) en el BMW Serie 3. En él se integran la EPS con el motor Diesel M57TU2 en 09/2006. Poco a poco se irá introduciendo la EPS como medida CO2 en todos los demás modelos.
La servodirección electromecánica (EPS) se diferencia de la dirección hidráulica convencional por la asistencia a la fuerza direccional. La EPS da asistencia al conductor mediante un motor de ajuste eléctrico en lugar de mediante un accionamiento hidráulico.
El servomotor solo está activo cuando se modifica la dirección. De esta forma, el servomotor no registra ninguna potencia cuando la marcha es recta.
La servodirección electromecánica ofrece las siguientes ventajas:
En el E92 el accionamiento para la EPS está dispuesto paralelo al eje. La disposición paralela al eje tiene ventajas frente a las disposiciones en el piñon o en la columna de dirección. La disposición paralela al eje tiene ventajas en cuanto a las fuerzas de la barra de acoplamiento que se pueden obtener, el comportamiento de oscilación, así como de la acústica.
Indice |
Explicación |
Indice |
Explicación |
|---|---|---|---|
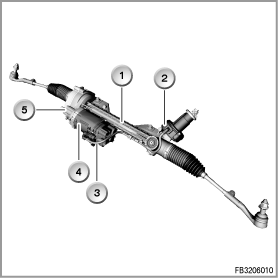
1 |
Cremallera |
2 |
Sensor de par de dirección |
3 |
Unidad de mando |
4 |
Servomotor |
5 |
Reductor de velocidad |
|
|
Se describen los siguientes componentes para la servodirección electromecánica:
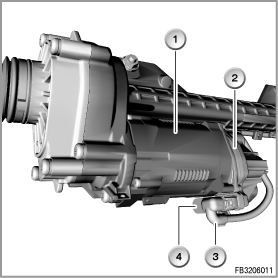
La servounidad está formada por los siguientes componentes:
La unidad de mando EPS forma parte de la servodirección electromecánica. La unidad de mando EPS está conectada con 2 conexiones enchufables a la red de a bordo.
El sensor del par de dirección está conectado con una conexión enchufable adicional a la unidad de mando EPS.
En la unidad de mando EPS se guardan varias líneas características para la servoasistencia, el retrogiro activo de la dirección, así como la característica de la amortiguación. Con los valores calculados a partir de las magnitudes de entrada, conjuntamente con la línea característica correspondiente, se obtiene la asistencia a la fuerza direccional necesaria.
La placa de fusible atrás (maletero) alimenta la servounidad con el borne 30.
Indice |
Explicación |
Indice |
Explicación |
|---|---|---|---|
1 |
Servomotor |
2 |
Unidad de mando EPS |
3 |
Conexión enchufable al sensor de par de viraje |
4 |
Conexión enchufable a la red de a bordo |
El servomotor es un motor de corriente continua sincrónico sin colector (gestión permanente). El servomotor acciona el reductor de velocidad. De este modo la potencia del servomotor se transfiere a la cremallera.
En la platina de la unidad de mando hay 2 sensores de posición del motor (redundancia). Los dos sensores se basan en el principio del efecto Hall (sensor Hall con rueda magnética). La rueda magnética está fijada al árbol del motor.
El sensor de posición del motor 1 determina la posición del servomotor. El sensor proporciona una señal sinusoidal y una señal de coseno. A partir de estas señales se determina la posición del rotor del servomotor. El sensor de posición del motor 2 sirve para supervisar (plausibilidad).
Los dos sensores son alimentados con tensión por la unidad de mando EPS.
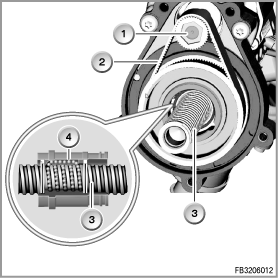
El reductor de velocidad transfiere la potencia del servomotor a la cremallera. La relación de giro entre el servomotor y el volante es de aprox. 21:1.
El reductor de velocidad se compone de una transmisión de correa y un accionamiento de bola roscada. El accionamiento de bola roscada tiene una inclinación de 7 mm por giro.
El servomotor impulsa la correa dentada. La transmisión de correa tiene una reducción de 2,85:1. La correa dentada impulsa el accionamiento de bola roscada. El accionamiento de bola roscada dispone de una guía de retorno de bola (5 vueltas). El accionamiento de la bola de rosca está optimizado contra el ruido.
Indice |
Explicación |
Indice |
Explicación |
|---|---|---|---|
1 |
Árbol de accionamiento del servomotor |
2 |
Correa dentada |
3 |
Cremallera |
4 |
Cadena de bola |
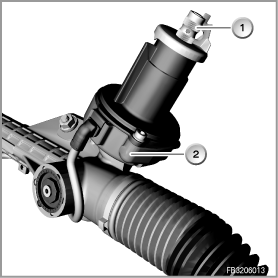
El sensor de par de dirección registra digitalmente el par de dirección del conductor. El rango de trabajo es de 4 vueltas (equivale a 1440°).
Indice |
Explicación |
Indice |
Explicación |
|---|---|---|---|
1 |
Piñón con barra de torsión |
2 |
Sensor de par de dirección |
En el sensor del par de dirección hay 2 sensores (redundancia). Los dos sensores se basan en el principio del efecto Hall (sensor Hall con rueda magnética).
Gracias al par de dirección desaparece la barra de torsión. Además, la barra de torsión transfiere el par de dirección al piñón.
Los dos sensores proporcionan respectivamente una señal sinusoidal y una señal de coseno. A partir de las señales se determina el par de dirección aplicado por el conductor. Los dos sensores funcionan de forma independiente. El 2º sensor está por la alta disponibilidad del sistema (redundancia).
Los sensores digitalizan los datos registrados. Las señales se transfieren a través de una unión de dos alambres redundante.
Los dos sensores se alimentan con tensión mediante la unidad de mando EPS.
Las siguientes unidades de mando se comunican con la servodirección electromecánica:
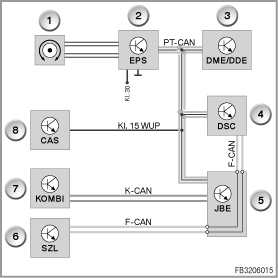
Indice |
Explicación |
Indice |
Explicación |
|---|---|---|---|
1 |
Sensor de par de dirección |
2 |
Unidad de mando EPS |
3 |
Electrónica Digital del Motor (DME) o bien Electrónica Digital Diesel (DDE) |
4 |
Control dinámico de la estabilidad (DSC) |
5 |
Sistema electrónico caja de conexión (JBE) |
6 |
Centro de mandos en la columna de dirección (SZL) |
7 |
Cuadro de instrumentos (KOMBI) |
8 |
Car Access System (CAS) |
F-CAN |
CAN del chasis |
CAN K |
CAN de la carrocería |
Borne 15 WUP |
Línea de excitación del borne 15 (Wake-up) |
PT-CAN |
Powertrain-CAN |
El sistema de regulación de la estabilidad en la marcha suministra la velocidad de marcha como señal de bus. Para ello, la unidad de mando correspondiente está conectada mediante el PT-CAN (Powertrain-CAN) a la EPS.
En el centro de mandos de la columna de dirección (SZL) está integrado el sensor de ángulo de la dirección. El sensor de ángulo de la dirección suministra el ángulo de la dirección como señal. La señal del sensor del ángulo de dirección se somete a plausibilidad frente a la señal del sensor de posición del motor. Si la divergencia es demasiado grande, se desconecta la asistencia a la dirección con registro en la memoria de defectos.
El ángulo de dirección y la velocidad del ángulo de dirección es calculado por la EPS a partir de la señal del sensor de posición del motor. La señal del sensor de ángulo de la dirección se necesita para inicializar y someter a plausibilidad.
El centro de mandos de la columna de dirección está conectado mediante el PT-CAN.
El sistema de control del motor suministra la señal ”Motor en marcha” en el PT-CAN. Para determinadas condiciones de servicio (p ej. arranque del motor) se requiere como señal el número de revoluciones del motor.
Si se produce una avería en la servodirección electromecánica (EPS), en la pantalla LCD aparecerá un símbolo de Check-Control amarillo. Al mismo tiempo, se enciende el testigo de control fijo en el cuadro de instrumentos.
El símbolo del Check-Control tiene el siguiente significado:
”EPS sin función”

Indice |
Explicación |
Indice |
Explicación |
|---|---|---|---|
1 |
Cuadro de instrumentos |
2 |
Testigo de control y símbolo del Check-Control |
Causas posibles para el encendido del mensaje del Check-Control pueden ser:
Se describen las siguientes funciones de sistema para la servodirección electromecánica (EPS):
En el sistema se ha integrado el Servotronic, la regulación electrónica de la asistencia a la fuerza direccional dependiente de la velocidad. La unidad de mando EPS determina la asistencia a la fuerza direccional necesaria a partir de diferentes magnitudes de entrada.
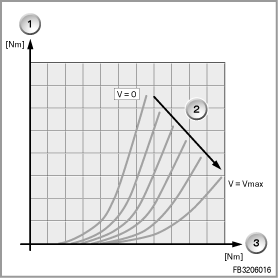
Indice |
Explicación |
Indice |
Explicación |
|---|---|---|---|
1 |
Par de la asistencia a la dirección |
2 |
Velocidad de marcha |
3 |
Par de dirección aplicado por el conductor |
|
|
En la unidad de mando se han almacenado campos característicos para las características de asistencia y amortiguación. Con los valores calculados a partir de las magnitudes de entrada, conjuntamente con la línea característica correspondiente, se obtiene la asistencia a la fuerza direccional necesaria. El par de dirección se genera a partir del servomotor y de la asistencia a la dirección.
Las magnitudes de entrada principales para la asistencia a la fuerza direccional son:
La EPS adapta la divergencia de las señales del sensor de posición del motor y del sensor de ángulo de la dirección (p. ej. calzada curvada en la marcha en línea recta).
El restablecimiento activo de la dirección provoca que la dirección regrese de nuevo a su posición inicial después de una curva, en cuanto el conductor deja de aplicar un par de dirección. Para ello, la unidad de mando EPS requiere el ángulo de dirección que le proporciona el sensor de ángulo de la dirección. El retrogiro activo de la dirección garantiza un retorno harmónico de la dirección en toda la temperatura de servicio. Es muy importante disponer de un retrogiro activo de la dirección de las posiciones finales en el caso de bajas temperaturas. De esta forma, la conducción es más cómoda.
En el restablecimiento activo de la dirección está integrada una amortiguación de balanceo.
Información sobre la calzada son p. ej. cambios en la fricción o irregularidades. La EPS recopila esta información mediante el cambio del par de dirección.
A partir de las siguientes magnitudes se calcula la aceleración en el eje delantero:
A partir de ahí la EPS vuelve a calcular una proporción del par de dirección para el mensaje de calzada activa.
Para una sobretensión mayor que 17 V, la asistencia a la dirección se desconecta. La unidad de mando EPS guarda un error. Se ilumina un símbolo de Check-Control en el cuadro de instrumentos. Si la tensión vuelve a bajar por debajo de 16 V, la asistencia a la fuerza direccional vuelve al valor necesario en ese momento. El símbolo de Check-Control se apaga cuando se alcanza el 100 % de la asistencia a la fuerza direccional necesaria.
Con una subtensión menor que 10,5 V se reduce la potencia del motor de forma lineal hasta 9 V. Bajo 9 V no se produce ninguna asistencia a la dirección. El mensaje del Check-Control se emite a un 40 % de la asistencia a la dirección (con registro en la memoria de defectos). Si la tensión vuelve a subir por encima de 10 V, la asistencia a la fuerza direccional vuelve al valor necesario en ese momento. El símbolo de Check-Control se apaga cuando se alcanza el 100 % de la asistencia a la fuerza direccional necesaria.
Como protección de sobretemperatura la EPS reduce el par motor teórico en función de la temperatura de la etapa final entre 0 y 100 %. Además, la unidad de mando EPS ejecuta la reducción en las siguientes etapas:
La EPS detecta sobrecarga al pisar el borde de una acera. En este caso entran las siguientes señales en la detección:
La EPS tiene como función por software a izquierda y derecha un tope final. De este modo, se protegen los topes finales mecánicos (amortiguador) ante un desgaste prematuro. La función por software utiliza las siguientes señales para calcular los topes finales:
¡Atención! Aprender topes finales.
Tras un cambio de la dirección se tienen que aprender de nuevo los topes finales del engranaje de dirección.
Unos topes finales mal aprendidos pueden provocar como un golpe de la asistencia a la dirección en el tope final.
Las siguientes condiciones se deben cumplir al aprender los topes finales:
Al aprender los topes finales, la dirección se debe girar por completo una vez hacia la izquierda y la derecha lentamente. La velocidad de la dirección debe ser inferior a 1 vuelta por segundo. En los topes finales aumentar lentamente la fuerza de la dirección hasta que el volante no gire más.
Después de unos 5 segundos se apagarán los testigos de control y el símbolo del Check-Control en el cuadro de instrumentos.
El sistema de diagnóstico BMW incluye la siguiente función de servicio:
Con esta función de servicio se borran los valores para los topes finales (p. ej. tras un aprendizaje erróneo). Al mismo tiempo se borra la divergencia respecto al ángulo de dirección.
Después del cambio, la unidad de mando EPS debe codificarse.
La asistencia a la dirección se activa bajo las siguientes condiciones:
Si el motor está detenido y la velocidad de marcha es 0, se desactiva la asistencia a la dirección.
Salvo error u omisión; sujeto a modificaciones técnicas.