I E92 införs en elektromekanisk servostyrning (EPS: Electronic Power Steering) i BMW 3-serien. Där startar EPS med dieselmotorn M57TU2, 09/2006. Successivt införs EPS som en CO2-åtgärd i alla modeller i fortsättningen.
Den elektromekaniska servostyrningen (EPS) skiljer sig från en vanlig servostyrning genom styrservomekaniken. EPS hjälper föraren genom en elektrisk ställmotor i stället för genom en hydraulisk drivning.
Ställmotorn är endast verksam när bilen styrs. Alltså upptar ställmotorn ingen effekt vid körning rakt fram.
Den elektromekaniska servostyrningen ger följande fördelar:
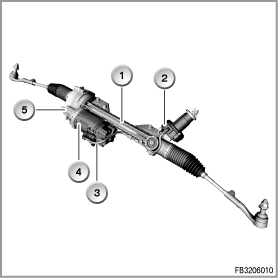
I E92 är drivningen för EPS placerad parallellt med axlarna. Axelparallell placering innebär fördelar jämfört med placering på pinjong eller rattstång. Axelparallell placering ger fördelar som t ex att en högre styrstagskraft kan uppnås samt bättre vibrationsförhållande och akustik.
Index |
Förklaring |
Index |
Förklaring |
|---|---|---|---|
1 |
Kuggstång |
2 |
Styrmomentgivare |
3 |
Styrenhet |
4 |
Ställmotor |
5 |
Reducerväxel |
|
|
Följande komponenter för den elektromekaniska servostyrningen bekrivs:
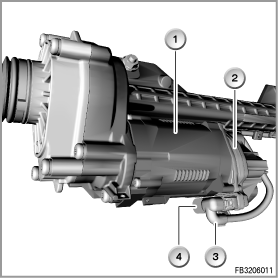
Servoenheten består av följande komponenter:
EPS-styrenheten är en del av den elektromekaniska servostyrningen. EPS-styrenheten är ansluten till bilens elsystem med 2 kontaktanslutningar.
Styrmomentgivaren är ansluten till EPS-styrenheten via en extra kontaktanslutning.
I EPS-styrenheten är flera karakteristikkurvor sparade för servostöd, aktiv rattåterställning samt dämpningskarakteristik. De värden som beräknas utifrån ingångsstorheterna ger tillsammans med den aktuella karakteristikkurvan det erforderliga styrservostödet.
Säkringshållaren bak (i bagageutrymmet) försörjer servoenheten med Kl. 30.
Index |
Förklaring |
Index |
Förklaring |
|---|---|---|---|
1 |
Ställmotor |
2 |
EPS-styrenhet |
3 |
Kontaktanslutning till styrmomentgivaren |
4 |
Kontaktanslutning till bilens elsystem |
Ställmotorn är en kollektorlös, synkron likströmsmotor (permanentmagnet). Ställmotorn driver reducerväxeln. Därigenom överförs ställmotorns effekt till kuggstången.
På styrenhetens kretskort finns 2 motorlägesgivare (redundans). Båda givarna använder halleffektsprincipen (hallgivare med magnethjul). Magnethjulet är fastmonterat på motoraxeln.
Motorlägesgivare 1 fastställer ställmotorns läge. Givaren avger en sinussignal och en cosinussignal. Utifrån signalerna fastställs ställmotorns rotorposition. Motorlägesgivare 2 används för övervakning (rimlighetsutvärdering).
Båda givarna försörjs med spänning av EPS-styrenheten.
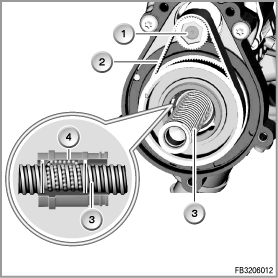
Reducerväxeln överför ställmotorns effekt till kuggstången. Varvtalsförhållandet mellan ställmotorn och ratten är ca 21:1.
Reducerväxeln består av en remdrivning och en kulgängad drivning. Den kulgängade drivningen har en ökning på 7 mm per varv.
Ställmotorn driver kuggremmen. Remdrivningen har en utväxling på 2,85:1. Kuggremmen driver den kulgängade drivningen. Den kulgängade drivningen har en intern kulåterföring (5 omlopp). Den kulgängade drivningen är ljudoptimerad.
Index |
Förklaring |
Index |
Förklaring |
|---|---|---|---|
1 |
Drivaxel ställmotor |
2 |
Kuggrem |
3 |
Kuggstång |
4 |
Kulkedja |
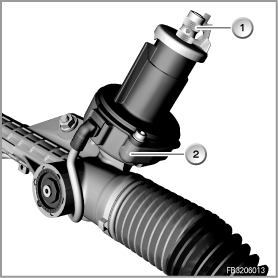
Styrmomentgivaren registrerar digitalt de styrmoment som föraren skapar. Arbetsområdet är 4 rattvarv (motsvarar 1440°).
Index |
Förklaring |
Index |
Förklaring |
|---|---|---|---|
1 |
Pinjong med torsionsstav |
2 |
Styrmomentgivare |
I styrmomentgivaren finns det 2 givare (redundans). Båda givarna använder halleffektsprincipen (hallgivare med magnethjul).
Genom styrmomentet vrids torsionsstaven. Därvid överför torsionsstaven styrmomentet till pinjongen.
Båda givarna levererar en sinussignal och en cosinussignal. Utifrån signalerna fastställs vilket styrmoment föraren producerar. De två givarna arbetar oberoende av varandra. Den 2:a givaren finns för att ge systemet en högre tillgänglig kapacitet (redundans).
Givarna digitaliserar de data som fastställs. Signalerna överförs via en redundant tvåtrådsförbindelse.
Båda givarna försörjs med spänning av EPS-styrenheten.
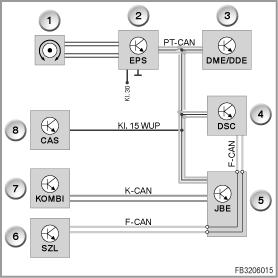
Följande övriga styrenheter kommunicerar med den elektromekaniska servostyrningen:
Index |
Förklaring |
Index |
Förklaring |
|---|---|---|---|
1 |
Styrmomentgivare |
2 |
EPS-styrenhet |
3 |
DME (Digital motorelektronik) eller DDE (Digital dieselelektronik) |
4 |
Dynamisk stabilitetskontroll (DSC) |
5 |
Junction-boxens elektronik (JBE) |
6 |
Rattstångens kopplingsmodul (SZL) |
7 |
Kombiinstrument (KOMBI) |
8 |
Car Access System (CAS) |
F-CAN |
Chassi-CAN |
K-CAN |
Karosserie-CAN |
Kl. 15 WUP |
Kl. 15 Aktiveringskabel (Wake-up) |
PT-CAN |
Drivlinans CAN |
Körstabilitetsregleringssystemet skickar bilens hastighet som buss-signal. För detta ändamål är motsvarande styrenhet förbunden med EPS genom PT-CAN (drivlinans CAN).
RattvinkelgivarenI är integrerad i rattstångens kopplingsmodul (SZL). Rattvinkelgivaren skickar rattvinkeln som signal. Rattvinkelgivarsignalens rimlighet utvärderas mot signalen från motorlägesgivaren. Om värdena avviker för mycket kopplas styrservon ifrån och en felminnesregistrering sker.
Rattvinkeln och rattvinkelhastigheten beräknar EPS utifrån signalen från motorlägesgivaren. Signalen från rattvinkelgivaren krävs endast för initiering och rimlighetsutvärdering.
Rattstångens kopplingsmodul är ansluten via PT-CAN.
Motorstyrningen skickar signalen ”Motorn går” via PT-CAN. Vid vissa driftförhållanden (t ex vid motorstart) krävs motorvarvtalet som signal.
Om den elektromekaniska servostyrningen (EPS) skulle sluta fungera, visas en gul Check-Control-symbol på LCD-displayen. Samtidigt lyser den fasta kontrollampan i kombiinstrumentet.
Check-Control-symbolen innebär följande:
”EPS ur funktion”

Index |
Förklaring |
Index |
Förklaring |
|---|---|---|---|
1 |
Kombiinstrument |
2 |
Kontrollampa och Check-Control-symbol |
Möjliga orsaker till att Check-Control-meddelandet tänds kan vara:
Följande systemfunktioner finns beskrivna för den elektromekaniska servostyrningen (EPS):
En del av systemet är Servotronic, den elektroniska regleringen av det hastighetsberoende servostödet. EPS-styrenheten fastställer det erforderliga styrservostödet ur olika ingångsstorheter.
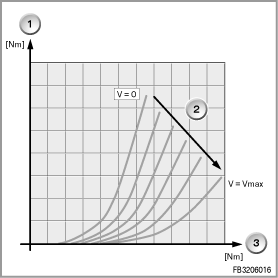
Index |
Förklaring |
Index |
Förklaring |
|---|---|---|---|
1 |
Styrservomoment |
2 |
Hastighet |
3 |
Styrmoment producerat av föraren |
|
|
I styrenheten är karakteristikfält för stöd- och dämpningskarakteristiken lagrade. De värden som beräknas utifrån ingångsstorheterna ger tillsammans med karakteristikkurvan det erforderliga styrservostödet. Från ställmotorn och reducerväxeln levereras styrservon.
Viktiga ingångsstorheter för styrservostödet är:
EPS anpassar avvikelsen mellan signalerna från motorlägesgivaren och rattvinkelgivaren (t ex krokig väg vid körning rakt fram).
Den aktiva styrningsåterställningen för tillbaka styrningen till rakt-fram-läget efter en kurva, så snart som föraren inte utför något styrmoment mer. För att den ska fungera kräver EPS-styrenheten rattvinkeln från rattvinkelgivaren. Den aktiva styrningsåterställningen säkerställer en lugn återställning av styrningen över hela arbetstemperaturen. Speciellt vid låg temperatur är det viktigt med en aktiv styrningsåterställning från ändlägena. Därigenom ökas manövreringskomforten.
I den aktiva styrningsåterställningen är en krängningsdämpning integrerad.
Information om körunderlaget är t ex friktionsändringar eller vägens beskaffenhet. EPS anpassar denna information genom en ändring av styrmomentet.
Ur följande storlekar beräknas accelerationen på framaxeln:
Ur denna i sin tur beräknar EPS en andel av styrmomentet för den aktiva återrapportering av körbanans skick.
Vid överspänning högre än 17 volt kopplas styrservon ifrån. EPS-styrenheten sparar då ett fel. En Check-Control-symbol i kombiinstrumentet tänds. När spänningen åter sjunker till under 16 volt, återgår servostödet till det värde som för tillfället behövs. Check-Control-symbolen slocknar, när 100 % av det styrservostöd som begärts uppnås.
Vid en underspänning mindre än 10,5 volt reduceras motoreffekten linjärt ner till 9 volt. Under 9 volt är styrservon inte längre aktiv. Check-Control-meddelandet visas vid 40 % av styrservostödet (med felminnesregistrering). När spänningen åter stiger till över 10 volt, återgår servostödet till det värde som för tillfället behövs. Check-Control-symbolen slocknar, när 100 % av det styrservostöd som begärts uppnås.
Som övertemperaturskydd reducerar EPS motorns börmoment i överensstämmelse med slutstegstemperaturen mellan 0 och 100 %. EPS-styrenheten genomför reduceringen i följande steg:
EPS identifierar överbelastning vid fråntryckning från en trottoarkant. Följande signaler räknas med i identifieringen:
EPS har ett ändanslag som programvarufunktion till vänster och höger. Därigenom skyddas de mekaniska ändanslagen (buffertarna) mot snabbt slitage. Programvarufunktionen använder följande signaler för att beräkna ändanslag:
OBS! Lär in ändanslagen.
Efter byte av styrningen måste styrväxelns ändanslag läras in på nytt.
Felaktigt inlärda ändanslag kan leda till att styrservon plötsligt bortfaller vid ett ändanslag.
Följande villkor måste vara uppfyllda för att ändanslagen ska kunna läras in:
När ändanslagen lärs in måste ratten vridas en gång långsamt hela vägen åt vänster och åt höger. Styrhastigheten måste ligga under ett rattvarv per sekund. Öka långsamt styrkraften vid ändanslagen, tills ratten inte längre vrids.
Efter ca 5 sekunder slocknar kontrollampan och Check-Control-symbolen i kombiinstrumentet.
I BMW diagnossystem finns följande servicefunktion:
Med denna servicefunktion raderas värdena för ändanslagen (t ex efter en felaktig inlärning). Samtidigt raderas avvikelsen mot rattvinkeln.
Efter ett byte måste EPS-styrenheten kodas.
Styrservon kopplas till under följande villkor:
När motorn står stilla och hastigheten är 0, avaktiveras styrservon.
Med förbehåll för tryckfel, felaktigheter och tekniska ändringar.