ที่นั่งแบบแอ็คทีฟ E65, E66
ที่นั่งแบบแอ็คทีฟ E65, E66
ที่นั่งแบบแอคทีฟช่วยผ่อนคลายกล้ามเนื้อหลังและกระดูกสันหลัง
ตั้งแต่ 09/2006 ระบบนิวเมติกจะเริ่มนำมาใช้งาน ระบบนิวเมติกจะนำมาใช้แทนระบบไฮดรอลิกที่ใช้อยู่ในปัจจุบัน
คำอธิบายโดยย่อเกี่ยวกับอุปกรณ์
อุปกรณ์ต่อไปนี้ได้อธิบายไว้ :
- SMFA และ SMBF : โมดูลที่นั่งคนขับและโมดูลที่นั่งผู้โดยสาร
- BZM : ชุดสวิตช์ส่วนกลางที่คอนโซลกลาง
- CAS : ระบบการเข้า-ออกรถ
- ปุ่มสำหรับที่นั่งแบบแอ็คทีฟ
- ตัวขับของที่นั่งแบบแอ็คทีฟที่มีที่รองรับบั้นเอว
- ตัวจ่ายความดัน
- เบาะลม
- ที่รองรับบั้นเอว
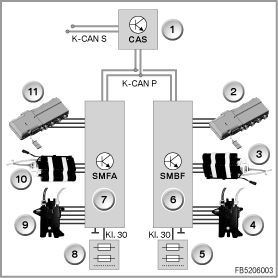
- SMFA และ SMBF : โมดูลที่นั่งคนขับและโมดูลที่นั่งผู้โดยสาร
โมดูลที่นั่งจะทำหน้าที่ควบคุมตัวขับของที่นั่งแบบแอ็คทีฟที่มีที่รองรับบั้นเอวและตัวจ่ายความดัน ที่นั่งคนขับและที่นั่งผู้โดยสารด้านหน้า แต่ละที่นั่งจะมีตัวขับของที่นั่งแบบแอ็คทีฟที่มีที่รองรับบั้นเอวและตัวจ่ายความดันติดตั้งไว้ โมดูลที่นั่งจะเป็นตัวเปิด/ปิดไฟแสดงการทำงานปุ่มสำหรับที่นั่งแบบแอ็คทีฟ (ชุดสวิตช์ด้านซ้ายและชุดสวิตช์ด้านขวามือที่ชุดสวิตช์ส่วนกลางที่คอนโซลกลางจะมีไฟ LED อยู่ข้างละ 1 ดวง) โมดูลที่นั่งต่ออยู่กับ K-CAN สำหรับอุปกรณ์ต่อพ่วง (CAN สำหรับระบบตัวถังสำหรับอุปกรณ์ต่อพ่วง)
ดัชนี
|
คำอธิบาย
|
ดัชนี
|
คำอธิบาย
|
1
|
ระบบการเข้ารถ (CAS)
|
2
|
ตัวจ่ายความดันของที่นั่งแบบแอ็คทีฟด้านผู้โดยสาร
|
3
|
ที่รองรับบั้นเอวของที่นั่งแบบแอ็คทีฟด้านผู้โดยสาร
|
4
|
ชุดวาล์วสำหรับปรับที่รองรับบั้นเอวด้านผู้โดยสาร
|
5
|
กล่องจ่ายไฟด้านหลัง
|
6
|
โมดูลที่นั่งผู้โดยสาร (SMBF)
|
7
|
โมดูลที่นั่งคนขับ (SMFA)
|
8
|
ชุดควบคุมการจ่ายกำลังไฟฟ้าด้านหน้า
|
9
|
ชุดวาล์วสำหรับปรับที่รองรับบั้นเอวด้านคนขับ
|
10
|
ตัวขับของที่นั่งแบบแอ็คทีฟที่มีที่รองรับบั้นเอวด้านผู้โดยสาร
|
11
|
ตัวจ่ายความดันของที่นั่งแบบแอ็คทีฟด้านคนขับ
|
|
|
K-CAN สำหรับอุปกรณ์ต่อพ่วง
|
CAN สำหรับระบบตัวถังสำหรับอุปกรณ์ต่อพ่วง
|
K-CAN S
|
ระบบ CAN สำหรับระบบตัวถัง
|
เทอร์มินอล 30
|
เทอร์มินอล 30
|
|
|
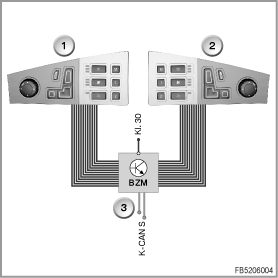
- BZM : ชุดสวิตช์ส่วนกลางของคอนโซลกลาง
BZM ประกอบด้วยตัวควบคุมเช่นเดียวกับชุดสวิตช์พร้อมปุ่มสำหรับปรับที่นั่ง สัญญาณปุ่มสำหรับปรับที่นั่งคนขับและที่นั่งผู้โดยสารจะถูกประมวลผลใน BZM
BZM จะทำการแปลงสัญญาณปุ่มสำหรับที่นั่งแบบแอ็คทีฟ (เปิด/ปิด) เช่นเดียวกับสัญญาณปุ่มสำหรับปรับที่รองรับบั้นเอวให้กลายเป็นสัญญาณดิจิตอล BZM จะส่งสัญญาณในรูปของข้อความไปที่ระบบ K-CAN (ระบบ CAN สำหรับระบบตัวถัง)
ดัชนี
|
คำอธิบาย
|
ดัชนี
|
คำอธิบาย
|
1
|
ชุดสวิตช์ด้านซ้ายในชุดสวิตช์ส่วนกลางที่คอนโซลกลาง
|
2
|
ชุดสวิตช์ด้านขวาในชุดสวิตช์ส่วนกลางที่คอนโซลกลาง
|
3
|
โมดูลแผงควบคุมการทำงาน, คอนโซลกลาง (BZM)
|
|
|
K-CAN S
|
ระบบ CAN สำหรับระบบตัวถัง
|
เทอร์มินอล 30
|
เทอร์มินอล 30
|
- CAS : ระบบการเข้า-ออกรถ
CAS ประกอบด้วยฟังก์ชั่นเกตเวย์ระหว่างระบบ K-CAN และ K-CAN สำหรับอุปกรณ์ต่อพ่วง (ระบบ K-CAN จะนำมาใช้แทน CAN สำหรับระบบตัวถัง และ K-CAN สำหรับอุปกรณ์ต่อพ่วง จะนำมาใช้แทน CAN สำหรับระบบตัวถังของอุปกรณ์ต่อพ่วง)
CAS จะรับข้อความ CAN มาจาก BZM ที่ระบบ K-CAN CAS จะส่งต่อข้อความ CAN ผ่าน K-CAN สำหรับอุปกรณ์ต่อพ่วงไปที่โมดูลที่นั่งที่ตรงกัน
- ปุ่มสำหรับที่นั่งแบบแอ็คทีฟรวมทั้งปุ่มของปรับที่รองรับบั้นเอว
ปุ่มสำหรับที่นั่งแบบแอ็คทีฟรวมทั้งปุ่มสำหรับปรับที่รองรับบั้นเอวจะติดตั้งอยู่ในแต่ละชุดสวิตช์ ที่อยู่ในชุดสวิตช์ส่วนกลางที่คอนโซลกลาง
สัญญาณปุ่มจะถูกส่งผ่านสายเคเบิลไปที่ชุดสวิตช์ส่วนกลางที่คอนโซลกลาง (BZM)
ดัชนี
|
คำอธิบาย
|
ดัชนี
|
คำอธิบาย
|
1
|
ชุดสวิตช์ด้านซ้ายในชุดสวิตช์ส่วนกลางที่คอนโซลกลาง
|
2
|
ปุ่มสำหรับปรับที่รองรับบั้นเอว
|
3
|
ปุ่มสำหรับที่นั่งแบบแอ็คทีฟ
|
4
|
ปุ่มควบคุม
|
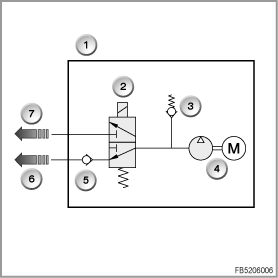
- ตัวขับของที่นั่งแบบแอ็คทีฟที่มีที่รองรับบั้นเอว
ตัวขับของที่นั่งแบบแอ็คทีฟที่มีที่รองรับบั้นเอวประกอบด้วยอุปกรณ์ต่อไปนี้ :
- ปั๊มนิวเมติกพร้อมทั้งมอเตอร์ปั๊ม
ปั๊มนิวเมติกจะทำหน้าที่ในการส่งลมอัดไปที่เบาะลมและที่นั่งแบบแอ็คทีฟ รวมทั้งเบาะรองรับบั้นเอว
ปั๊มนิวเมติกขับเคลื่อนด้วยมอเตอร์กระแสตรงแบบสองทิศทาง
- โซลินอยด์วาล์ว
โซลินอยด์วาล์วจะส่งผ่านการไหลของอากาศจากปั๊มนิวเมติก ดังนี้ :
- ไปที่เบาะรองรับบั้นเอว
หรือ
- ไปที่ตัวจ่ายความดันสำหรับเบาะลมของที่นั่งแบบแอ็คทีฟ
- วาล์วระบายแรงดัน (Pressure relief valve)
วาล์วระบายความดันจะป้องกันระบบไม่ให้ความดันระบบมากเกินไป วาล์วระบายความดันถูกติดตั้งหลังจากปั๊มนิวเมติกในท่อจ่าย
- ชุดอิเล็กทรอนิกส์ควบคุม
ชุดอิเล็กทรอนิกส์ควบคุมมีฟังก์ชั่นต่างๆ ต่อไปนี้ :
- การสั่งงานมอเตอร์ปั๊ม
ชุดอิเล็กทรอนิกส์ควบคุมจะควบคุม ชุดส่งเอาต์พุต 2 ที่มอเตอร์ปั๊ม
ฟังก์ชั่นที่นั่งแบบแอ็คทีฟที่เลือกไว้ :
มอเตอร์ปั๊มจะทำงานโดยลดกำลังส่งออกลง.
ฟังก์ชั่นที่รองรับบั้นเอวที่เลือกไว้ :
มอเตอร์ปั๊มจะทำงานโดยกำลังส่งออกเต็มที่
ชุดอิเล็กทรอนิกส์ควบคุมจะสั่งงานมอเตอร์ปั๊มให้เติมลมเบาะรองรับบั้นเอวและเบาะลมทั้ง 4 เท่านั้น
- การสั่งงานโซลินอยด์วาล์ว
ขึ้นอยู่กับฟังก์ชั่นที่เลือกไว้ (ที่นั่งแบบแอ็คทีฟหรือที่รองรับบั้นเอว) ชุดอิเล็กทรอนิกส์ควบคุมจะทำหน้าที่เปิดปิดโซลินอยด์วาล์ว การไหลของอากาศจะตรงไปที่ชิ้นส่วนต่างๆ ด้านดาวน์สตรีม
ดัชนี
|
คำอธิบาย
|
ดัชนี
|
คำอธิบาย
|
1
|
ตัวขับของที่นั่งแบบแอ็คทีฟที่มีที่รองรับบั้นเอว, ด้านคนขับหรือด้านผู้โดยสาร
|
2
|
โซลินอยด์วาล์ว
|
3
|
วาล์วระบายความดัน
|
4
|
ปั๊มนิวเมติกพร้อมมอเตอร์ปั๊ม
|
5
|
วาล์วกันกลับ
|
6
|
ไปที่ตัวจ่ายความดันในที่นั่งแบบแอ็คทีฟ
|
7
|
ไปที่เบาะรองรับบั้นเอว
|
|
|
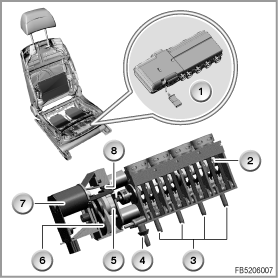
- ตัวจ่ายความดัน
ตัวจ่ายความดันจะกระจายการไหลของอากาศที่สร้างขึ้นโดยปั๊มนิวเมติก ไปที่เบาะลมทั้ง 4 ตัวจ่ายความดันจะทำการปรับการเติมลมและปล่อยลมของเบาะลมออกโดยอัตโนมัติ
ตัวจ่ายความดันประกอบด้วยส่วนต่างๆ ดังต่อไปนี้ :
- ชุดขับ
กลไกตัวขับประกอบด้วยมอเตอร์ชุดขับและชุดกลไก ถ้ามีการสั่งงานฟังก์ชั่นที่นั่งแบบแอ็คทีฟ มอเตอร์ชุดขับจะสั่งให้ชุดควบคุมทิศทางลมทำงานตลอดเวลา
- ไมโครสวิตช์สำหรับปิดเปิดมอเตอร์ปั๊ม
สวิตช์ที่ทำหน้าที่ตรวจสอบจานสัญญาณ พร้อมลูกเบี้ยวทั้ง 4 ในกลไกตัวขับ (ลูกเบี้ยวทั้ง 4 ใช้สำหรับเติมลมและปล่อยลมเบาะลมแต่ละชุดออก) ขั้นตอนนี้จะเป็นการตรวจจับวงจรการทำงาน รอบการหมุนหนึ่งรอบของกลไกตัวขับถือเป็นวงจรการทำงาน และจะเกิดขึ้นต่อไปประมาณ 80 วินาที
การปล่อยลมในเบาะลม มอเตอร์ปั๊มของปั๊มนิวเมติกเท่านั้นที่จะหยุดทำงาน ชุดขับในตัวจ่ายความดันจะยังทำงานต่อไป
ไมโครสวิตช์ต่ออยู่กับโมดูลที่นั่งโดยตรง
- ชุดควบคุมทิศทางแรงดัน
ชุดควบคุมทิศทางแรงดันจะทำหน้าที่ในกระจายการไหลของอากาศไปยังเบาะลมทั้ง 4
เพลาลูกเบี้ยวจะสั่งงานวาล์วเลื่อนให้ทำการเติมลม, อัดแรงดันลมค้างไว้และปล่อยลมเบาะลมออก
ดัชนี
|
คำอธิบาย
|
ดัชนี
|
คำอธิบาย
|
1
|
ตัวจ่ายความดัน
|
2
|
เพลาลูกเบี้ยว
|
3
|
จุดต่อลมอัด (ที่ต่อกับเบาะลม)
|
4
|
จุดต่อลมอัด (ตั้งแต่ตัวขับของที่นั่งแบบแอ็คทีฟที่มีที่รองรับบั้นเอว)
|
5
|
จานสัญญาณ
|
6
|
การเปลี่ยนเกียร์
|
7
|
มอเตอร์ชุดขับ
|
8
|
ไมโครสวิตช์
|
- เบาะลม
เบาะลมทั้งหมดถูกติดตั้งอยุ่ในที่นั่งแบบแอ็คทีฟ เบาะลมสองชุดจะถูกจัดไว้โดยที่ชุดหนึ่งวางอยู่เหนืออีกชุดหนึ่ง ที่เบาะรองนั่งด้านซ้ายและด้านขวามือ
ดัชนี
|
คำอธิบาย
|
ดัชนี
|
คำอธิบาย
|
1
|
เบาะลมในที่นั่งแบบแอ็คทีฟ
|
2
|
เบาะลม
|
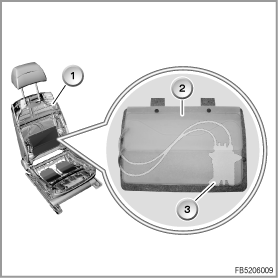
- ที่รองรับบั้นเอว
ที่รองรับบั้นเอวในพนักพิงประกอบด้วยเบาะรองรับบั้นเอวแบบเติมลมได้ 2 ชุด พร้อมจุกเติมลมทั้งหมด 2 อันในชุดวาล์ว เทคโนโลยีของจุกเติมลมที่ใช้จะไม่ขึ้นอยู่กับโซลินอยด์วาล์ว แต่จะขึ้นอยู่กับสายที่ผลิตจากโลหะผสมขึ้นรูป ต้องทำการเปลี่ยนกริดและโครงสร้างของสายทั้งสอง ตามอุณหภูมิที่กำหนดไว้ อย่างไรก็ตาม สายดังกล่าวสามารถทำให้กลับคืนเป็นรูปร่างเดิมได้อยู่เสมอ
เบาะรองรับบั้นเอวแต่ละชุดจะมีจุกเติมลมพร้อมสาย 2 สาย โดยสายหนึ่งไว้สำหรับเปิดท่อสายปล่อยลม และอีกสายหนึ่งไว้สำหรับท่อสายเติมลม หากไม่มีกระแสไฟฟ้า จุกเติมลมจะปิด
ปั๊มนิวเมติกจะทำหน้าที่ส่งลมอัดเข้าไปในเบาะรองรับบั้นเอว เบาะลมแต่ละชุดจะถูกเติมลมหรือปล่อยลมออก โดยขึ้นอยู่กับการตั้งค่าที่เลือกไว้ หมายความว่าที่รองรับบั้นเอวสามารถปรับความสูงและความแข็งให้เป็นแบบต่างๆ ได้ (การปรับที่รองรับบั้นเอวส่วนบนและส่วนล่าง)
ดัชนี
|
คำอธิบาย
|
ดัชนี
|
คำอธิบาย
|
1
|
เบาะรองรับบั้นเอวในที่นั่งแบบแอ็คทีฟ
|
2
|
เบาะรองรับบั้นเอว
|
3
|
ชุดวาล์ว (ที่ด้านหลัง)
|
|
|
การทำงานต่างๆ ของระบบ
ในเอกสารนี้มีคำอธิบายเกี่ยวกับฟังก์ชั่นระบบต่อไปนี้ :
- หลังจากทำงาน
- การกำหนดค่ามาตรฐานหลังจากถอดสายแบตเตอรี่
- การหยุดสั่งงานเมื่อไฟตกและแรงดันไฟฟ้าเกิน
- การตัดการทำงานเมื่ออัตราเร่งแนวขวางสูง
- หลังจากทำงาน
ในกรณีที่ระบบถูกยกเลิกการทำงานโดยปุ่มที่นั่งแบบแอ็คทีฟ เบาะลม 4 ชุดจะต้องยุบลง
การปล่อยลม : ขณะที่มอเตอร์ปั๊มหยุดทำงาน ตัวจ่ายความดันจะทำหน้าที่เสร็จสิ้นวงจรการทำงานทั้งหมด
- การกำหนดค่ามาตรฐานหลังจากถอดสายแบตเตอรี่
ระบบแอ็คทีฟจะยังปล่อยลมออกไม่หมดหลังจากถอดสายแบตเตอรี่ หรือมีการรีเซ็ตโมดูลที่นั่ง, เมื่อมีการสั่งงาน สัญญาณจะส่งจากไมโครสวิตช์ในตัวจ่ายความดัน ขณะที่มอเตอร์ปั๊มหยุดทำงาน ตัวจ่ายความดันจะทำหน้าที่เสร็จสิ้นวงจรการทำงานทั้งหมด
- การหยุดสั่งงานเมื่อไฟตกและแรงดันไฟฟ้าเกิน
โมดูลที่นั่งคนขับ (SMFA) หรือโมดูลที่นั่งผู้โดยสาร (SMBF) จะทำหน้าที่ตรวจจับไฟตกและแรงดันไฟฟ้าเกิน โมดูลที่นั่งจะปิดสวิตช์ตัวขับสำหรับที่นั่งแบบแอ็คทีฟ
ไฟตก : แรงดันไฟจ่ายออนบอร์ดน้อยกว่า 9 โวลท์
แรงดันไฟฟ้าเกิน : แรงดันไฟจ่ายออนบอร์ดมากกว่า 16 โวลท์
- การตัดการทำงานเมื่ออัตราเร่งแนวขวางสูง
ถ้าความเร็วในการขับขี่ และ อัตราเร่งแนวขวางเกินค่าที่กำหนดไว้ประมาณ 0.25 วินาที ที่นั่งแบบแอ็คทีฟสำหรับที่นั่งคนขับ จะหยุดทำงาน จอแสดงผลการทำงาน (ไฟ LED) จะยังคงทำงาน ถ้าค่าลงมาต่ำอีกครั้งเป็นเวลาประมาณ 3 วินาที ระบบจะเริ่มทำงานที่ตำแหน่งสุด
ชุดควบคุม DSC จะคำนวณความเร็วในการขับขี่และอัตราเร่งแนวขวาง ชุดควบคุม DSC จะส่งสัญญาณในรูปของข้อความบน CAN สำหรับระบบส่งกำลัง
หมายเหตุ :
ออปชั่น 455 ”ที่นั่งแบบแอ็คทีฟสำหรับคนขับและผู้โดยสาร” จะส่งมาพร้อมกับออปชั่นเสริม 488 ”ที่รองรับบั้นเอวสำหรับคนขับและผู้โดยสาร” เท่านั้น
รุ่นเฉพาะแต่ละประเทศ
สหรัฐอเมริกา, แคนาดา
ไม่สามารถติดตั้งที่นั่งแบบแอ็คทีฟบนที่นั่งผู้โดยสารด้านหน้าได้ เนื่องจากมีแผ่นตรวจจับการใช้ที่นั่งอยู่