
สำหรับรถรุ่น E92 พวงมาลัยเพาเวอร์แบบอิเล็กโทรแม็คคานิก (EPS : พวงมาลัยเพาเวอร์แบบอิเล็กทรอนิกส์) จะเริ่มนำมาใช้ในรถ BMW ซีรี่ส์ 3 EPS จะถูกนำมาใช้ร่วมกับเครื่องยนต์ดีเซล M57TU2 ตั้งแต่ 09/2006 โดยจะค่อยๆ นำ EPS มาเริ่มใช้เป็นข้อปฏิบัติ CO2 ในรุ่นอื่นๆ ทั้งหมด
พวงมาลัยเพาเวอร์แบบอิเล็กโทรแม็คคานิก (EPS) แตกต่างจากพวงมาลัยเพาเวอร์ทั่วไปคือ ในพวงมาลัยจะมีระบบช่วยผ่อนแรงในการบังคับเลี้ยว EPS จะช่วยผ่อนแรงคนขับด้วยมอเตอร์แอ๊คทูเอเตอร์แบบไฟฟ้าแทนที่จะเป็นมอเตอร์ไฮดรอลิก
มอเตอร์แอ๊คทูเอเตอร์จะทำงานเมื่อมีการหมุนพวงมาลัยเท่านั้น ซึ่งหมายความว่า มอเตอร์แอ๊คทูเอเตอร์จะไม่ใช้ไฟฟ้าในระหว่างที่ขับทางตรง
พวงมาลัยเพาเวอร์แบบอิเล็กโทรแม็คคานิกมีข้อดีดังนี้ :
สำหรับรถ E92 ตัวขับของ EPS จะถูกจัดวางมาในลักษณะที่ขนานไปกับเพลา การจัดวางโดยขนานไปกับเพลาถือเป็นข้อดี เมื่อเปรียบเทียบกับการจัดวางบนเฟืองพีเนียนหรือคอพวงมาลัย ประโยชน์ของการจัดวางแบบขนานไปกับเพลาคือทำให้สามารถได้รับแรงแทร็กรอดการบังคับเลี้ยว นอกจากนั้น ยังส่งผลดีในส่วนของคุณสมบัติในการสั่นสะเทือน รวมทั้งรูปแบบเสียง
ดัชนี |
คำอธิบาย |
ดัชนี |
คำอธิบาย |
|---|---|---|---|
1 |
แร็ค |
2 |
เซ็นเซอร์โมเมนตัมในการบังคับเลี้ยว |
3 |
ชุดควบคุม |
4 |
เซอร์โวมอเตอร์ |
5 |
เฟืองลดความเร็ว |
|
|
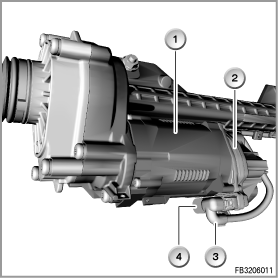
พวงมาลัยเพาเวอร์แบบอิเล็กโทรแม็คคานิกประกอบด้วยส่วนต่างๆ ดังต่อไปนี้ :
ชุดเซอร์โวประกอบด้วยส่วนต่างๆ ดังต่อไปนี้ :
ชุดควบคุม EPS เป็นส่วนหนึ่งของพวงมาลัยเพาเวอร์แบบอิเล็กโทรแม็คคานิก ชุดควบคุม EPS จะต่อเข้ากับระบบไฟฟ้ารถยนต์โดยใช้ปลั๊กต่อ 2 ตัว
เซ็นเซอร์โมเมนตัมในการบังคับเลี้ยวจะต่อโดยใช้ปลั๊กต่ออื่นที่ชุดควบคุม EPS
จำนวนเส้นกราฟลักษณะการทำงานของแรงช่วยเซอร์โว, การหมุนพวงมาลัยแบบแอ็คทีฟ รวมทั้งลักษณะการหน่วงจะถูกบันทึกไว้ในชุดควบคุม EPS ค่าที่ได้จากการประมวลผลตัวแปรอินพุตที่เพิ่มขึ้นในเส้นกราฟลักษณะการทำงานแต่ละเส้น จะส่งผลต่อระบบช่วยผ่อนแรงในการบังคับเลี้ยวที่จำเป็น
ที่ยึดฟิวส์ด้านหลัง (ช่องเก็บสัมภาระ) จะจ่ายไฟให้กับชุดเซอร์โวโดยใช้เทอร์มินอล 30
ดัชนี |
คำอธิบาย |
ดัชนี |
คำอธิบาย |
|---|---|---|---|
1 |
เซอร์โวมอเตอร์ |
2 |
ชุดควบคุม EPS |
3 |
ปลั๊กต่อที่ต่ออยู่กับเซ็นเซอร์โมเมนตัมการบังคับเลี้ยว |
4 |
ปลั๊กต่อที่ต่ออยู่กับเครือข่ายรถยนต์ |
มอเตอร์แอ๊คทูเอเตอร์เป็นมอเตอร์กระแสไฟตรง (DC) แบบน็อนคอลเลคเตอร์ (์Non-Collector) ที่สอดคล้องกัน (แม่เหล็กถาวร) มอเตอร์แอ๊คทูเอเตอร์จะทำหน้าที่เป็นตัวขับเคลื่อนเฟืองลดความเร็ว ซึ่งจะส่งผ่านกำลังส่งออกของมอเตอร์แอ๊คทูเอเตอร์ไปยังแร็ค
เซ็นเซอร์ตำแหน่งมอเตอร์จะมี 2 ตัว (อีกชุดหนึ่ง) ในแผงวงจรของชุดควบคุม เซ็นเซอร์ทั้งสองตัวจะใช้หลักการทำงานเดียวกันกับเซ็นเซอร์แบบฮอลล์ (เซ็นเซอร์แบบฮอลล์พร้อมล้อแม่เหล็ก) ล้อแม่เหล็กจะติดตั้งอยู่กับแกนมอเตอร์
เซ็นเซอร์ตำแหน่งมอเตอร์ 1 จะตรวจหาตำแหน่งของมอเตอร์แอ๊คทูเอเตอร์ เซ็นเซอร์จะส่งสัญญาณคลื่นรูปซายน์และสัญญาณคลื่นรูปโคไซน์ สัญญาณดังกล่าวจะถูกนำไปใช้เพื่อตรวจหาตำแหน่งการหมุนของมอเตอร์แอ๊คทูเอเตอร์ เซ็นเซอร์ตำแหน่งมอเตอร์ 2 ใช้สำหรับตรวจสอบ (ตรวจเช็คความสอดคล้องกัน)
เซ็นเซอร์ทั้งสองจะได้รับแรงดันไฟจ่ายที่ส่งมาจากชุดควบคุม EPS
เฟืองลดความเร็วจะส่งผ่านกำลังส่งออกของมอเตอร์แอ๊คทูเอเตอร์ไปยังแร็ค อัตราการหมุนระหว่างมอเตอร์แอ๊คทูเอเตอร์และพวงมาลัยอยู่ที่ประมาณ 21:1
เฟืองลดความเร็วประกอบด้วยตัวขับสายพานและสกรูแบบกลม สกรูแบบกลมจะเพิ่มขึ้น 7 มม. ต่อรอบการหมุนหนึ่งครั้ง
มอเตอร์แอ๊คทูเอเตอร์จะเป็นตัวขับเคลื่อนสายพานแบบมีร่องฟัน ตัวขับสายพานจะลดลง 2.85 : 1. สายพานแบบมีร่องฟันจะทำหน้าที่ขับเคลื่อนสกรูแบบกลม สกรูแบบกลมจะมีการหมุนกลับภายใน (5 รอบ) สกรูแบบกลมถูกออกแบบมาให้มีเสียงรบกวนน้อยที่สุด

ดัชนี |
คำอธิบาย |
ดัชนี |
คำอธิบาย |
|---|---|---|---|
1 |
เพลาขับของมอเตอร์แอ๊คทูเอเตอร์ |
2 |
สายพานแบบมีร่องฟัน |
3 |
แร็ค |
4 |
ขอบโซ่ |
เซ็นเซอร์โมเมนตัมในการบังคับเลี้ยวจะทำหน้าที่ตรวจจับแบบดิจิตอล เพื่อหาโมเมนตัมการบังคับเลี้ยวที่สั่งงานโดยคนขับ ช่วงการทำงานคือรอบการหมุนพวงมาลัย 4 รอบ (ตรงกับ 1440°).

ดัชนี |
คำอธิบาย |
ดัชนี |
คำอธิบาย |
|---|---|---|---|
1 |
เฟืองพีเนียนพร้อมทอร์ชั่นบาร์ (Torsion bar) |
2 |
เซ็นเซอร์โมเมนตัมในการบังคับเลี้ยว |
เซ็นเซอร์โมเมนตัมในการบังคับเลี้ยวประกอบด้วยเซ็นเซอร์ 2 ตัว (อีกชุดหนึ่ง) เซ็นเซอร์ทั้งสองตัวจะใช้หลักการทำงานเดียวกันกับเซ็นเซอร์แบบฮอลล์ (เซ็นเซอร์แบบฮอลล์พร้อมล้อแม่เหล็ก)
โมเมนตัมการบังคับเลี้ยวจะทำให้ทอร์ชั่นบาร์ (Torsion bar) เกิดการบิด ในขณะเดียวกัน ทอร์ชั่นบาร์ (Torsion bar) ก็จะส่งโมเมนตัมการบังคับเลี้ยวผ่านไปยังเฟืองพีเนียน
เซ็นเซอร์ทั้งสองจะส่งสัญญาณคลื่นรูปซายน์และสัญญาณคลื่นรูปโคไซน์ โมเมนตัมการบังคับเลี้ยวที่สั่งงานโดยคนขับสามารถตรวจพบได้จากสัญญาณดังกล่าว เซ็นเซอร์สองตัวจะทำงานโดยไม่เกี่ยวข้องกัน เซ็นเซอร์ตัวที่ 2 มีอยู่เนื่องจากระบบที่มีลำดับความสำคัญสูงกว่า (อีกระบบหนึ่ง)
เซ็นเซอร์ทั้งสองตัวจะตรวจหาข้อมูลแบบดิจิตอล สัญญาณจะถูกส่งผ่านสายต่อแบบคู่อีกอันหนึ่ง
เซ็นเซอร์ทั้งสองจะได้รับแรงดันไฟจ่ายที่ส่งมาจากชุดควบคุม EPS
ชุดควบคุมอื่นๆ ต่อไปนี้จะติดต่อกับพวงมาลัยเพาเวอร์แบบอิเล็กโทรแม็คคานิก :

ดัชนี |
คำอธิบาย |
ดัชนี |
คำอธิบาย |
|---|---|---|---|
1 |
เซ็นเซอร์โมเมนตัมในการบังคับเลี้ยว |
2 |
ชุดควบคุม EPS |
3 |
DME (ชุดอิเล็กทรอนิกส์ควบคุมเครื่องยนต์แบบดิจิตอล) หรือ DDE (ชุดอิเล็กทรอนิกส์ควบคุมเครื่องดีเซลแบบดิจิตอล) |
4 |
DSC (ระบบควบคุมเสถียรภาพ) |
5 |
ชุดอิเล็กทรอนิกส์สำหรับกล่องต่อไฟ (JBE) |
6 |
แผงสวิตช์ที่คอพวงมาลัย (SZL) |
7 |
แผงหน้าปัด (KOMBI) |
8 |
ระบบการเข้ารถ (CAS) |
F-CAN |
CAN สำหรับแชสซี |
K-CAN |
CAN สำหรับระบบตัวถัง |
เทอร์มินอล 15 WUP |
สายกระตุ้นให้กลับมาทำงาน เทอร์มินอล 15 |
PT-CAN |
CAN สำหรับระบบส่งกำลัง |
ระบบควบคุมเสถียรภาพขณะขับขี่จะส่งความเร็วในการขับขี่ในรูปของสัญญาณบัส ดังนั้น ชุดควบคุมที่เกี่ยวข้องจะต่อผ่าน PT-CAN (CAN สำหรับระบบส่งกำลัง) เข้ากับ EPS
เซ็นเซอร์มุมบังคับเลี้ยวรวมอยู่ในชุดสวิตช์ที่คอพวงมาลัย (SZL) เซ็นเซอร์มุมบังคับเลี้ยวจะส่งข้อมูลมุมบังคับเลี้ยวไปในรูปของสัญญาณ จะมีการตรวจเช็คความสอดคล้องกันของสัญญาณเซ็นเซอร์มุมบังคับเลี้ยว เพื่อให้ตรงกับสัญญาณของเซ็นเซอร์ตำแหน่งมอเตอร์ ถ้าค่าความเบี่ยงเบนมีมากเกินไป ระบบพวงมาลัยเพาเวอร์จะหยุดทำงานพร้อมมีข้อมูลหน่วยความจำรหัสความผิดปกติ
EPS จะประมวลผลมุมบังคับเลี้ยวและความเร็วของมุมบังคับเลี้ยวจากสัญญาณของเซ็นเซอร์ตำแหน่งมอเตอร์ สัญญาณของเซ็นเซอร์มุมบังคับเลี้ยวจะจำเป็นต้องใช้ก็ต่อเมื่อทำการกำหนดการทำงานและตรวจเช็คความสอดคล้องกัน
ชุดสวิตช์ส่วนกลางที่คอพวงมาลัยจะต่อผ่าน PT-CAN
ระบบควบคุมการทำงานเครื่องยนต์จะส่งสัญญาณ ”เครื่องยนต์กำลังทำงาน” บน PT-CAN สำหรับเงื่อนไขการทำงานบางอย่าง (เช่น สตาร์ทเครื่องยนต์) ความเร็วรอบเครื่องจำเป็นจะต้องนำไปใช้ในรูปแบบของสัญญาณ
ในกรณีที่พวงมาลัยเพาเวอร์แบบอิเล็กโทรแม็คคานิก (EPS) ผิดปกติ จะมีสัญลักษณ์เช็ค-คอนโทรลสีเหลืองปรากฏขึ้นในจอ LC ในเวลาเดียวกันไฟแสดงตำแหน่งที่แน่นอนจะติดสว่างขึ้นในแผงหน้าปัด
สัญลักษณ์เช็ค-คอนโทรลมีความความหมายดังต่อไปนี้ :
”EPS without function”

ดัชนี |
คำอธิบาย |
ดัชนี |
คำอธิบาย |
|---|---|---|---|
1 |
แผงหน้าปัด |
2 |
ไฟแสดงและสัญลักษณ์เช็ค-คอนโทรล |
เมื่อข้อความเช็ค-คอนโทรลติดสว่างขึ้น อาจมีสาเหตุมาจาก :
พวงมาลัยเพาเวอร์แบบอิเล็กโทรแม็คคานิก (EPS) ประกอบด้วยการทำงานของระบบดังต่อไปนี้ :
ในระบบจะมีเซอร์โวโทรนิก (ชุดควบคุมอิเล็กทรอนิกส์ของระบบช่วยผ่อนแรงในการบังคับเลี้ยวแบบปรับตามความเร็วในการขับขี่) รวมอยู่ด้วย ชุดควบคุม EPS จะกำหนดแรงช่วยในการบังคับเลี้ยวที่จำเป็นจากตัวแปรอินพุตต่างๆ

ดัชนี |
คำอธิบาย |
ดัชนี |
คำอธิบาย |
|---|---|---|---|
1 |
โมเมนต์ของระบบพวงมาลัยเพาเวอร์ |
2 |
ความเร็วรถ |
3 |
โมเมนตัมการบังคับเลี้ยวที่สั่งงานโดยคนขับ |
|
|
แผนผังลักษณะการทำงานสำหรับการเสริมและการหน่วงจะถูกบันทึกไว้ในชุดควบคุม ค่าที่ได้จากการประมวลผลตัวแปรอินพุตที่เพิ่มขึ้นในเส้นกราฟลักษณะการทำงานแต่ละเส้น จะส่งผลต่อระบบช่วยผ่อนแรงในการบังคับเลี้ยวที่จำเป็น มอเตอร์แอ๊คทูเอเตอร์และเฟืองลดความเร็วจะช่วยให้มีระบบพวงมาลัยเพาเวอร์
ตัวแปรอินพุตที่สำคัญสำหรับระบบช่วยผ่อนแรงในการบังคับเลี้ยว ได้แก่ :
EPS จะช่วยปรับความเบี่ยงเบนของสัญญาณต่างๆ ที่ส่งมาจากเซ็นเซอร์ตำแหน่งมอเตอร์และเซ็นเซอร์มุมบังคับเลี้ยว (เช่น การขับรถทางตรงบนขอบถนน)
หลังจากขับรถเข้าโค้ง การหมุนพวงมาลัยแบบแอ็คทีฟจะช่วยให้การบังคับเลี้ยวกลับมาอยู่ในตำแหน่งการขับขี่ทางตรง ทันทีที่คนขับยกเลิกการสั่งงานโมเมนตัมการบังคับเลี้ยว ในการตั้งศูนย์ ชุดควบคุม EPS ต้องใช้มุมบังคับเลี้ยวจากเซ็นเซอร์มุมบังคับเลี้ยว การหมุนพวงมาลัยแบบแอ็คทีฟช่วยให้สามารถทำการบังคับเลี้ยวได้อย่างสอดคล้องในทุกอุณหภูมิทำงาน การหมุนพวงมาลัยแบบแอ็คทีฟกลับมาจากตำแหน่งสุดเป็นสิ่งที่สำคัญมากเมื่ออยู่ที่อุณหภูมิระดับต่ำ เนื่องจากจะทำให้ใช้งานได้สะดวกยิ่งขึ้น
แกนปรับแบบไจโรจะรวมอยู่ในการหมุนพวงมาลัยแบบแอ็คทีฟ
ข้อมูลเกี่ยวกับผิวถนน เช่น การเปลี่ยนแปลงของค่าสัมประสิทธิ์ความเสียดทานหรือคุณสมบัติต่างๆ EPS จะให้ข้อมูลโดยเปลี่ยนโมเมนตัมการบังคับเลี้ยว
ตัวแปรต่างๆ ต่อไปนี้จะถูกนำไปใช้เพื่อคำนวณอัตราเร่งที่ช่วงล่างหน้า :
หลังจากนั้น EPS จะคำนวณสัดส่วนของโมเมนตัมการบังคับเลี้ยวสำหรับข้อมูลส่งกลับของถนนแบบแอ็คทีฟ
ในกรณีที่ค่าแรงดันไฟฟ้าเกินสูงกว่า 17 โวลท์ ระบบพวงมาลัยเพาเวอร์จะหยุดทำงาน ชุดควบคุม EPS จะบันทึกความผิดปกติไว้ สัญลักษณ์เช็ค-คอนโทรลจะติดสว่างขึ้นในแผงหน้าปัด เมื่อแรงดันไฟลดลงต่ำกว่า 16 โวลท์ แรงช่วยในการบังคับเลี้ยวจะกลับไปเป็นค่าที่ต้องการในขณะนั้น สัญลักษณ์เช็ค-คอนโทรลจะดับไปเมื่อแรงช่วยในการบังคับเลี้ยวถึงค่าที่ต้องการ 100 %
ในกรณีที่ค่าแรงดันไฟตกต่ำกว่า 10.5 โวลท์ เอาต์พุตมอเตอร์จะลดลง (แบบเชิงเส้น) อยู่ที่ 9 โวลท์ หากต่ำกว่า 9 โวลท์ ระบบพวงมาลัยเพาเวอร์จะไม่ทำงานอีกต่อไป ข้อความเช็ค-คอนโทรลจะแสดงขึ้นที่ 40 % ของระบบพวงมาลัยเพาเวอร์ (พร้อมข้อมูลหน่วยความจำรหัสความผิดปกติ) เมื่อแรงดันไฟเพิ่มขึ้นเกิน 10 โวลท์ แรงช่วยในการบังคับเลี้ยวจะกลับไปเป็นค่าที่ต้องการในขณะนั้น สัญลักษณ์เช็ค-คอนโทรลจะดับไปเมื่อแรงช่วยในการบังคับเลี้ยวถึงค่าที่ต้องการ 100 %
สำหรับการป้องกันอุณหภูมิสูงเกิน EPS จะช่วยลดแรงบิดเครื่องยนต์ที่กำหนดตามอุณหภูมิชุดส่งเอาต์พุตระหว่าง 0 % และ 100 %. จากขั้นตอนนี้ ชุดควบคุม EPS จะทำการลดในขั้นตอนต่อไปนี้ :
EPS จะตรวจจับการโอเวอร์โหลดเมื่อมีการบิดพวงมาลัยจนกระทั่งรถชิดกับขอบถนน สัญญาณต่างๆ ต่อไปนี้จะรวมอยู่ในการตรวจจับ :
EPS มีตำแหน่งสุดที่ด้านซ้ายและขวาตำแหน่งสุดตามการทำงานของซอฟท์แวร์ ซึ่งจะช่วยป้องกันตำแหน่งสุดทางกล (บัฟเฟอร์) ไม่ให้เกิดการสึกหรอเร็วก่อนกำหนด ฟังก์ชั่นซอฟท์แวร์จะใช้สัญญาณต่อไปนี้ในการประมวลผลตำแหน่งสุด :
จุดสำคัญ ! การรับรู้และกำหนดค่าตำแหน่งสุด
หลังจากที่เปลี่ยนพวงมาลัยแล้ว จะต้องทำการรับรู้และกำหนดค่าตำแหน่งสุดของกระปุกพวงมาลัยอีกครั้ง
การรับรู้และกำหนดค่าตำแหน่งสุดที่ไม่ถูกต้องอาจทำให้ระบบพวงมาลัยเพาเวอร์หยุดทำงานแบบกระทันหันที่ตำแหน่งสุดได้
การรับรู้และกำหนดค่าตำแหน่งสุด จำเป็นต้องปฏิบัติตามเงื่อนไขต่างๆ ต่อไปนี้ :
สำหรับการรับรู้และกำหนดค่าตำแหน่งสุด จะต้องค่อยๆ หมุนพวงมาลัยไปทางด้านซ้ายจนสุดหนึ่งครั้ง และหมุนไปทางทางด้านขวาจนสุดหนึ่งครั้งเช่นกัน ความเร็วในการหมุนพวงมาลัยจะต้องต่ำกว่า 1 รอบ ต่อ 1 วินาที เมื่อถึงตำแหน่งสุด ค่อยๆ เพิ่มแรงในการหมุนพวงมาลัยต่อไปจนกระทั่งไม่สามารถหมุนได้อีกต่อไป
หลังจากประมาณ 5 วินาที ไฟแสดงและสัญลักษณ์เช็ค-คอนโทรลที่แผงหน้าปัดจะดับไป
ฟังก์ชั่นบริการที่มีอยู่ในระบบการวิเคราะห์ของ BMW มีดังนี้ :
ฟังก์ชั่นบริการใช้เพื่อลบค่าต่างๆ ของตำแหน่งสุด (เช่น หลังจากทำการรับรู้และกำหนดค่าไม่ถูกต้อง) ในขณะเดียวกัน ค่าความเบี่ยงเบนของมุมบังคับเลี้ยวก็จะถูกลบออกไป
หลังจากทำการเปลี่ยนแล้ว ต้องให้รหัสชุดควบคุม EPS
ระบบพวงมาลัยเพาเวอร์จะทำงานตามเงื่อนไขต่อไปนี้ :
ขณะที่เครื่องยนต์หยุดนิ่งและความเร็วในการขับขี่อยู่ที่ 0 ระบบพวงมาลัยเพาเวอร์จะไม่สามารถใช้งานได้
อาจเกิดความผิดพลาดเนื่องจากการพิมพ์หรือความผิดพลาดอื่นๆ ได้. ข้อมูลทางเทคนิคอาจเปลี่ยนแปลงได้โดยไม่ต้องแจ้งให้ทราบล่วงหน้า