Dinamik sürüş, viraj sürüşü sırasında aracın sallanma eğilimini önler veya azaltır. Titreşim konforu artar. Aracın direksiyon hakimiyeti optimize edilir.
Dynamic Drive için aşağıdaki parçalar tanımlanır:
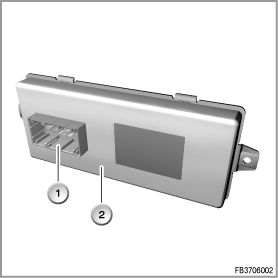
Kontrol ünitesinin fonksiyonları bir mikro işlemci tarafından kumanda edilir. Kontrol ünitesi üzerinden terminal 30 gerilim ile beslenir (10 A ile emniyete alınmış). Kontrol ünitesi, uyandırma hattı (terminal 15) üzerinden devreye sokulur.
İndeks |
Açıklama |
İndeks |
Açıklama |
|---|---|---|---|
1 |
Dynamik Drive soketi |
2 |
Dynamik Drive Kontrol ünitesi |
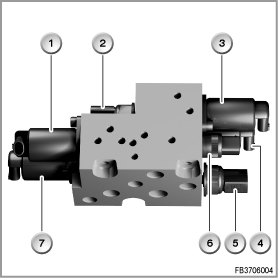
Valf bloğuna aşağıdaki valfler entegre edilmiştir:
Valf bloğu, ön sağ tekerlek davlumbazında A-Kolonuna yerleştirilmiştir. Valf bloğunun görevleri şunlardır:
İki basınç ayar valfi (bir ön aks ve bir arka aks) yağ akışını paylaştırır. Ardından yağ akışı döndürme motoruna gider. Ön aks döndürme motorunun basıncı, arka aks döndürme motoru basıncından daha fazla veya aynıdır.
Yüksek basınç yağının gerçek basınçlarının ölçümü: Valf bloğu çıkışlarında ön aks döndürme motoru ve arka aks döndürme motoru için birer basınç sezicisi bulunur.
Her iki devrik motorunun dönüş yönü, müşterek bir yön valfi üzerinden belirlenir. Yön valfinin pozisyonu bir devre konumu tanıma sezicisi üzerinden tanınır ve denetlenir.
Aşağıdaki durumlarda ön aks döndürme motoru kilitlenir. Yakıt hattından daha sonra yapılacak bir emme işlemi, kesme valfleri üzerinden mümkündür.
Yakıt hattından daha sonra yapılacak bir emme işlemi, kesme valfleri üzerinden mümkündür.
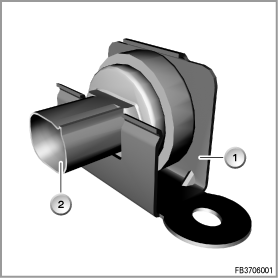
Ölçülen yanal ivmelenme Dynamic Drive için en önemli büyüklüktür. Yanal ivmelenme sezicisinin sıfır noktası bir diyagnoz emri üzerinden Dynamic Drive kontrol ünitesinin ilgili servis fonksiyonunda öğrenilebilir.
İndeks |
Açıklama |
İndeks |
Açıklama |
|---|---|---|---|
1 |
Yanal ivmelenme sezicisi |
2 |
Yanal ivmelenme sezicisi soketi |
Basınç sezicileri valf bloğuna yerleştirilmiştir. Basınç sezicilerinin sıfır noktası değerleri, diyagnoz emirleri üzerinden Dynamic Drive kontrol ünitesinin ilgili servis fonksiyonlarında öğrenilir.
Devre konumu tanıma sezicisi valf bloğunda düzenlenmiştir ve yön valfinin konumunu tanır.
Basınç ayar valfleri, valf bloğunda bulunur. Basınç ayar valflerine elektriksel olarak kumanda edilir. Bununla ön ve arka aks stabilizatörü için basınç ayarlanır. Düz yolda seyrederken basınç ayar valflerinde akım bulunmaz. Yağ akımı depoya serbestçe geçebilir. Virajda valfler beslenir. Döndürme motorlarındaki basınç artar ve itibari değere ayarlanır.
Yön valfi valf bloğunda bulunmaktadır. Yön valfine elektriksel olarak kumanda edilir. Yön valfi sol veya sağ viraj için yağ akışı yönünü verir. Bir devre konumu tanıma sezicisi, yön valfinin pozisyonunu denetler.
Emniyet valfi valf bloğunda bulunmaktadır. Emniyet valfi elektrikli kumanda edilir ve ön aks döndürme motorunu akımsız kapatır.
Check valfler valf bloğunda bulunur. Tek yönlü valfine yağ ilave edilebilir. Böylece döndürme motorunda boşluk önlenir.
İndeks |
Açıklama |
İndeks |
Açıklama |
|---|---|---|---|
1 |
Yön valfi |
2 |
Arka aks basınç sezicisi |
3 |
Ön aks orantılı-basınç sınırlandırma valfi |
4 |
Arka aks orantılı-basınç sınırlandırma valfi |
5 |
Ön aks basınç sezicisi |
6 |
Vites konumu algılama sezicisi |
7 |
Emniyet valfi |
|
|
Aktif Stabilizatörler ortadan dikey olarak bölünmüştür. Aktif Stabilizatör, bir devrik motordan ve devrik motora monte edilmiş preslenmiş makaralı yatağı olan stabilizatör yarı parçalarından, meydana gelir. Döndürme motorunun mili ve muhafazası birer stabilizatör yarısı ile bağlıdır. Devrik motorda, karşılıklı duran hücreler birbirlerine bağlanmıştır. Hücrelerde aynı basınç bulunur. Bir bağlantı üzerinden iki hücre yüksek basınçlı yağ ile beslenir. Diğer iki hücre genleşme kabı için geri dönüş hattı ile bağlıdır. Farklı yüksek basınçlar nedeniyle farklı yüksek kuvvetler meydana gelir. Böylece mili gövdeye göre ters yönde buran bir döndürme momenti oluşur. Stabilizatörün bir yarısı mil ile diğer yarısı da gövde ile bağlantılı olduğundan, stabilizatör yarı parçaları birbirini zıt yönde burar. Böylece üretilen stabilizasyon momenti sallanma hareketine karşı etki eder. Sistem basıncı azami olarak 180 bar değerindedir.
İndeks |
Açıklama |
İndeks |
Açıklama |
|---|---|---|---|
1 |
Ön döndürme motoru |
2 |
Hidrolik bağlantı |
3 |
Hidrolik bağlantı |
|
|
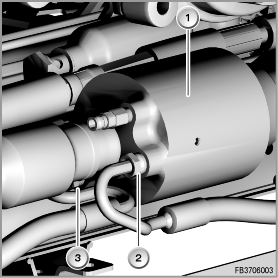
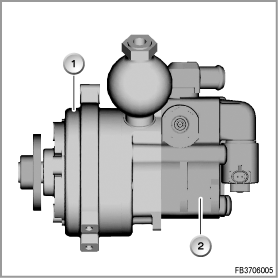
Tandem pompa, Dynamic Drive aynı şekilde direksiyon yardımının yağ devresini besler. Pompa, Dinamik sürüş sistemi için bir radyal piston ve direksiyon yardımı için bir kanat hücresi, meydana gelir. Dinamik sürüşün ve direksiyon yardımının müşterek bir yağ soğutucusu ve yağ haznesi vardır.
İndeks |
Açıklama |
İndeks |
Açıklama |
|---|---|---|---|
1 |
Tandem pompanın radyal piston parçası |
2 |
Tandem pompanın kanat hücresi kısmı |
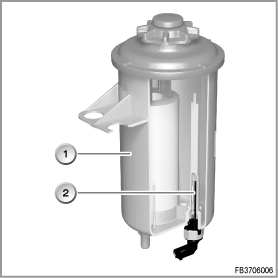
Yağ deposuna, bir filtre ve bir yağ seviyesi şalteri entegre edilmiştir. Yağ seviyesi minimumun altına düştüğünde, Dynamic Drive kontrol ünitesi bir sinyal gönderir.
İndeks |
Açıklama |
İndeks |
Açıklama |
|---|---|---|---|
1 |
Yağ haznesi |
2 |
Yağ seviyesi şalteri |
Yağ sıcaklığı, yağ radyatörü tarafından 120 derece değerinin altında tutulur. Yağ sıcaklığı kısa süreli olarak azami 135 derece değerine çıkabilir.
Dynamic Drive için aşağıdaki sistem fonksiyonları tanımlanır:
Dinamik sürüş, yanal ivmelenmeye bağlı olarak iki tane etken stabilizatörü devreye sokar. Bu suretle araç üst yapısının virajlardaki devrilme hareketleri ve bozuk yollardaki kopyalama hareketleri, azaltılmış olur.
Dinamik sürüş kontrol ünitesi, giriş sinyallerinden devrik motorlara nasıl kumanda edilmesi gerektiğini hesaplar. Giriş sinyallerinin mantıklılığı kontrol edilir ve sistemin denetiminde kullanılır.
En önemli ayar büyüklüğü yanal ivmelenmedir. İlave olarak PT-CAN-Sinyalleri değerlendirilir:
İlave bilgiler yardımıyla sistemin reaksiyon süresi iyileştirilir.
Kontrol cihazlarının çıkışları kısa devreye dayanıklı şekilde tasarlanmıştır:
Valf, akım ayarlaması üzerinden gerçekleşir (Empülsiyon genişliği modülasyona uğramış sinyal). PT CAN üzerinden, motorun DME ya da DDE'sine ek bir gücün kullanılıp kullanılmayacağı bildirilir. Sadece bu şekilde, güç talebi, örneğin: devreye sokma sırasındaki rölanti, karşılanabilir.
Dynamic Drive, duran araçta araçta aktif değildir. Tüm valfler akımsızdır. Yani araç dururken aktif stabilizatörlerden momentler elde edilemez. Yatık duran bir araç, (örneğin: Yoldaki bir taş ya da eşit oransız yükleme) ölçülebilen yanal ivmelenmeye rağmen bir ayarlama tetiklemez. Yaklaşık 15 km/h hızdan itibaren Dynamic Drive aktiftir.
Uyarı! Çalıştırmada sallanma hareketi
Araç çalıştırma esnasında çok güçlü ve hızlı sallanma hareketi yürütür. Bu nedenle hiç kimseyi doğrudan araçta, özellikle hareketli araç parçalarının yakınında bulundurmamalısınız. Aracın altında veya tekerlek davlumbazlarında hiçbir cisim bulunmamalıdır! Araç tüm tekerlekleri ile sabit ve düz bir zemin üzerinde bulunurken işletmeye alınmalıdır. Çalıştırma işlemi asla
yapılmalıdır. Bunlara dikkat edilmediği takdirde ölüm tehlikesi vardır!
Sistem hidroliği açıldıktan sonra, yani
çalışmalardan sonra ilk çalıştırmada yapılmalıdır. Dynamic Drive kontrol ünitesinin programlanması veya kodlanması sırasında aynı şekilde devreye alınması gereklidir.
İşletmeye alma
Çalıştırma işlemi, parametre ve bütün sezicilerin sıfır noktasının öğrenilmesini sağlar. Çalıştırma işlemi 5 faza ayrılır ve yaklaşık 25 saniye sürer.
Uyarı! İlk çalıştırmada sıcaklık
Yağ sıcaklığı, çalıştırma için önemli bir parametredir. İşletmeye alma (diyagnoz komutu üzerinden) üst sınır sıcaklıklarında yapılmamalıdır (ortam ve sistem sıcaklığı).
Kontrol ünitesinin kodlanması veya programlanmasından sonra çalıştırma işlemi yürütülmelidir.
Aşağıdaki uyarılar ve bunların nedenleri Check Control mesajı olarak CID'de görünebilir:
Aşağıdaki uyarılarda:
Dynamik Drive sistemi devreden çıkarıldı.
Dikkat, araç virajlarda Dynamic Drive sistemi olmayan araçlardan daha güçlü eğimlenir. Bir sonraki atölyeye kadar sürüşe devam etmek için koşul:
İkaz bildirimi için olası sebepler:
Sebebini tam olarak tespit edebilmek için, arıza hafızası okunmalı ve gösterilen kontrol planı tamamlanmalıdır. Hata giderildiğinde, arıza hafızası silinmelidir.
Bu uyarıda:
sürücü, aracının yürüyen aksamında ve direksiyon sisteminde yağ kaybı olduğu konusunda bilgilendirilir.
Bir sonraki atölyeye kadar sürüşe devam etmek bu durumda mümkün değildir.
İkaz bildirimi için olası sebepler:
Sebebini tam olarak tespit edebilmek için, arıza hafızası okunmalı ve gösterilen kontrol planı tamamlanmalıdır. Hata giderildiğinde, arıza hafızası silinmelidir.
Bu uyarıda:
sürücü, yürüyen aksam stabilizitesinin Dynamic Drive'den dolayı sınırlandığı, ancak sürüşe devam edilebileceği konusunda bilgilendirilir.
İlk fırsatta bir atölye ile temasa geçilmelidir.
İkaz bildirimi için olası sebepler:
Sebebini tam olarak tespit edebilmek için, arıza hafızası okunmalı ve gösterilen kontrol planı tamamlanmalıdır. Hata giderildiğinde, arıza hafızası silinmelidir.
Yazım hatası, yanlışlıklar ve teknik değişiklikler saklıdır.